ACIS Tools
The ezdxf.acis sub-package provides some ACIS data management
tools. The main goals of this tools are:
It is NOT a goal to load and edit arbitrary existing ACIS structures.
Don’t even try it!
These tools cannot replace the official ACIS SDK due to the complexity of the data structures and the absence of an ACIS kernel. Without access to the full documentation it is very cumbersome to reverse-engineer entities and their properties, therefore the analysis of the ACIS data structures is limited to the use as embedded data in DXF and DWG files.
The ezdxf library does not provide an ACIS kernel and there are no plans for implementing one because this is far beyond my capabilities, but it is possible to extract geometries made up only by flat polygonal faces (polyhedron) from ACIS data. Exporting polyhedrons as ACIS data and loading this DXF file by Autodesk products or BricsCAD works for SAT data for DXF R2000-R2010 and for SAB data for DXF R2013-R2018.
Important
Always import from the public interface module ezdxf.acis.api,
the internal package and module structure may change in the future and
imports from other modules than api will break.
Functions
- ezdxf.acis.api.load_dxf(entity: DXFEntity) list[Body]
Load the ACIS bodies from the given DXF entity. This is the recommended way to load ACIS data.
The DXF entity has to be an ACIS based entity and inherit from
ezdxf.entities.Body. The entity has to be bound to a valid DXF document and the DXF version of the document has to be DXF R2000 or newer.- Raises:
DXFTypeError – invalid DXF entity type
DXFValueError – invalid DXF document
DXFVersionError – invalid DXF version
Warning
Only a limited count of ACIS entities is supported, all unsupported entities are loaded as
NONE_ENTITYand their data is lost. Exporting suchNONE_ENTITIESwill raise anExportErrorexception.To emphasize that again: It is not possible to load and re-export arbitrary ACIS data!
Example:
import ezdxf
from ezdxf.acis import api as acis
doc = ezdxf.readfile("your.dxf")
msp = doc.modelspace()
for e in msp.query("3DSOLID"):
bodies = acis.load_dxf(e)
...
- ezdxf.acis.api.export_dxf(entity: DXFEntity, bodies: Sequence[Body])
Store the ACIS bodies in the given DXF entity. This is the recommended way to set ACIS data of DXF entities.
The DXF entity has to be an ACIS based entity and inherit from
ezdxf.entities.Body. The entity has to be bound to a valid DXF document and the DXF version of the document has to be DXF R2000 or newer.- Raises:
DXFTypeError – invalid DXF entity type
DXFValueError – invalid DXF document
DXFVersionError – invalid DXF version
Example:
import ezdxf
from ezdxf.render import forms
from ezdxf.acis import api as acis
doc = ezdxf.new("R2000")
msp = doc.modelspace()
# create an ACIS body from a simple cube-mesh
body = acis.body_from_mesh(forms.cube())
solid3d = msp.add_3dsolid()
acis.export_dxf(solid3d, [body])
doc.saveas("cube.dxf")
- ezdxf.acis.api.load(data: str | Sequence[str] | bytes | bytearray) list[Body]
Returns a list of
Bodyentities from SAT or SAB data. Accepts SAT data as a single string or a sequence of strings and SAB data as bytes or bytearray.
- ezdxf.acis.api.export_sat(bodies: Sequence[Body], version: int = const.DEFAULT_SAT_VERSION) list[str]
Export one or more
Bodyentities as text based SAT data.ACIS version 700 is sufficient for DXF versions R2000, R2004, R2007 and R2010, later DXF versions require SAB data.
- Raises:
ExportError – ACIS structures contain unsupported entities
InvalidLinkStructure – corrupt link structure
- ezdxf.acis.api.export_sab(bodies: Sequence[Body], version: int = const.DEFAULT_SAB_VERSION) bytes
Export one or more
Bodyentities as binary encoded SAB data.ACIS version 21800 is sufficient for DXF versions R2013 and R2018, earlier DXF versions require SAT data.
- Raises:
ExportError – ACIS structures contain unsupported entities
InvalidLinkStructure – corrupt link structure
- ezdxf.acis.api.mesh_from_body(body: Body, merge_lumps=True) list[MeshTransformer]
Returns a list of
MeshTransformerinstances from the given ACISBodyentity. The list contains multiple meshes if merge_lumps isFalseor just a single mesh if merge_lumps isTrue.The ACIS format stores the faces in counter-clockwise orientation where the face-normal points outwards (away) from the solid body (material).
Note
This function returns meshes build up only from flat polygonal
Faceentities, for a tessellation of more complex ACIS entities (spline surfaces, tori, cones, …) is an ACIS kernel required which ezdxf does not provide.- Parameters:
body – ACIS entity of type
Bodymerge_lumps – returns all
Lumpentities from a body as a single mesh ifTrueotherwise eachLumpentity is a separated mesh
- Raises:
TypeError – given body entity has invalid type
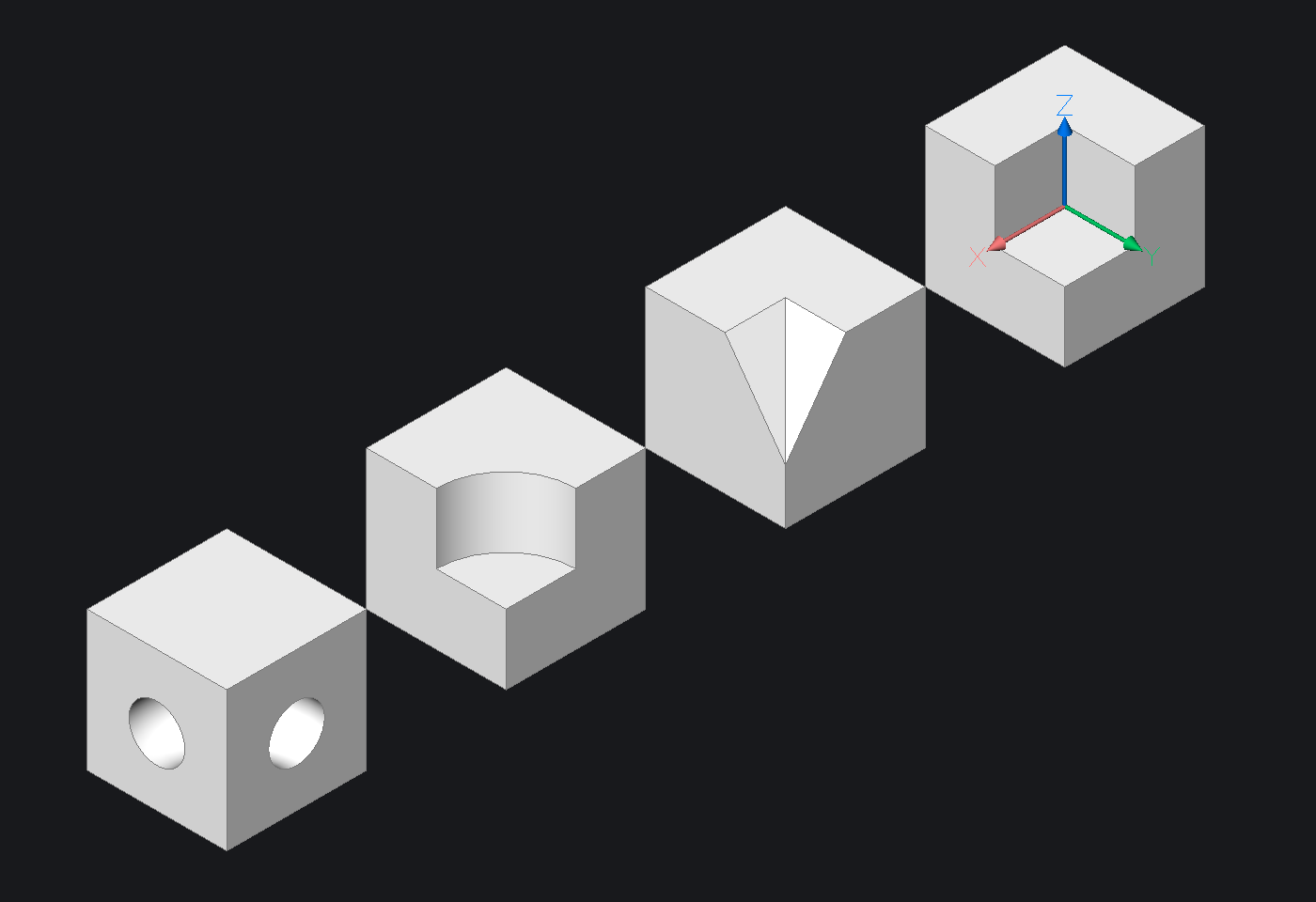
The following images show the limitations of the mesh_from_body()
function. The first image shows the source 3DSOLID entities with
subtraction of entities with flat and curved faces:
Example script to extracts all flat polygonal faces as meshes:
import ezdxf
from ezdxf.acis import api as acis
doc = ezdxf.readfile("3dsolids.dxf")
msp = doc.modelspace()
doc_out = ezdxf.new()
msp_out = doc_out.modelspace()
for e in msp.query("3DSOLID"):
for body in acis.load_dxf(data):
for mesh in acis.mesh_from_body(body):
mesh.render_mesh(msp_out)
doc_out.saveas("meshes.dxf")
The second image shows the flat faces extracted from the 3DSOLID entities
and exported as Mesh entities:
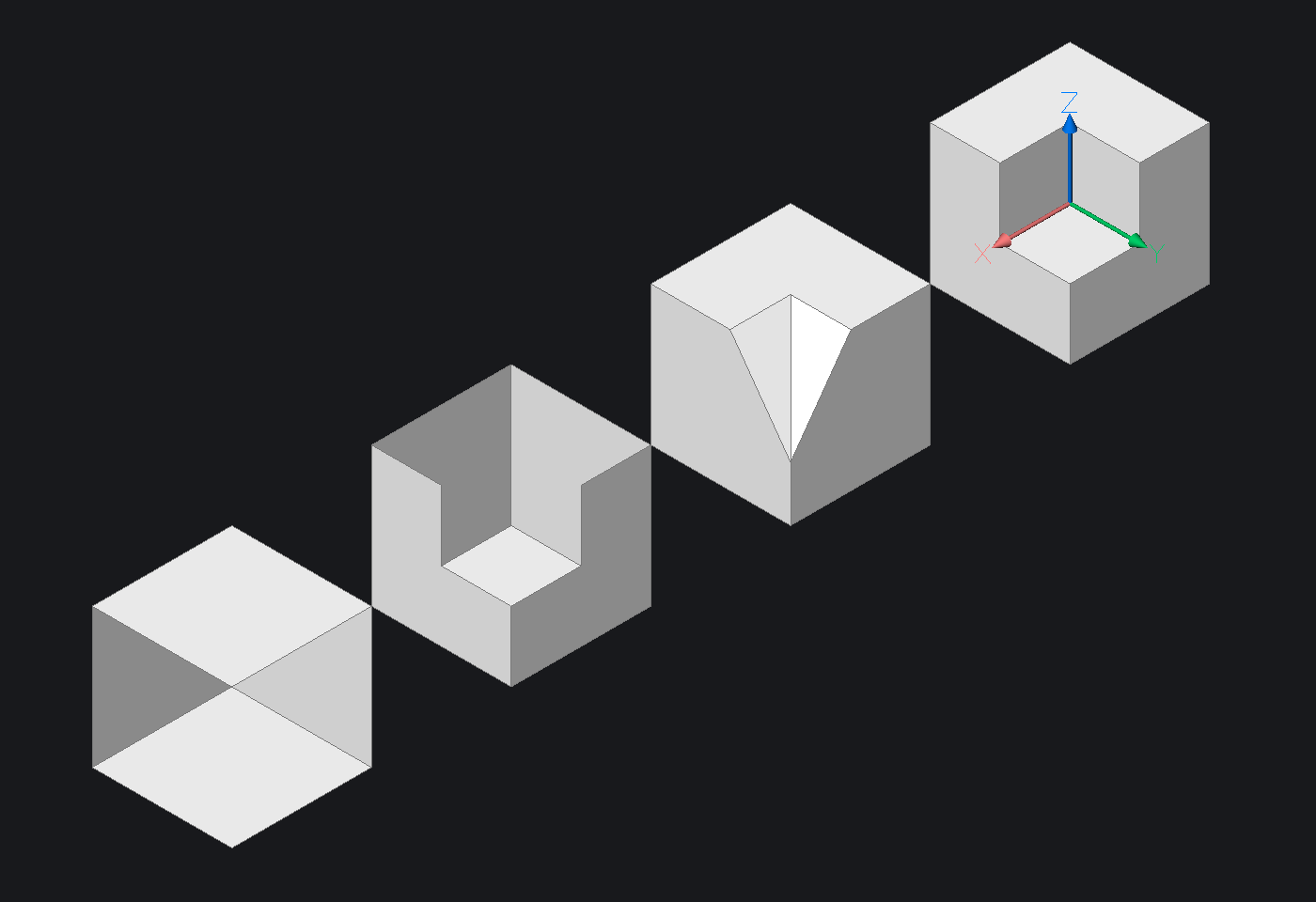
As you can see all faces which do not have straight lines as boundaries are lost.
- ezdxf.acis.api.body_from_mesh(mesh: MeshBuilder, precision: int = 6) Body
Returns a ACIS
Bodyentity from aMeshBuilderinstance.This entity can be assigned to a
Solid3dDXF entity as SAT or SAB data according to the version your DXF document uses (SAT for DXF R2000 to R2010 and SAB for DXF R2013 and later).If the mesh contains multiple separated meshes, each mesh will be a separated
Lumpnode. If each mesh should get its ownBodyentity, separate the meshes beforehand by the methodseparate_meshes().A closed mesh creates a solid body and an open mesh creates an open (hollow) shell. The detection if the mesh is open or closed is based on the edges of the mesh: if all edges of mesh have two adjacent faces the mesh is closed.
The current implementation applies automatically a vertex optimization, which merges coincident vertices into a single vertex.
- ezdxf.acis.api.vertices_from_body(body: Body) list[Vec3]
Returns all stored vertices in the given
Bodyentity. The result is not optimized, meaning the vertices are in no particular order and there are duplicates.This function can be useful to determining the approximate bounding box of an ACIS entity. The result is exact for polyhedra with flat faces with straight edges, but not for bodies with curved edges and faces.
- Parameters:
body – ACIS entity of type
Body- Raises:
TypeError – given body entity has invalid type
Exceptions
- class ezdxf.acis.api.AcisException
Base exception of the
ezdxf.acispackage.
- class ezdxf.acis.api.ParsingError
Exception raised when loading invalid or unknown ACIS structures.
- class ezdxf.acis.api.ExportError
Exception raised when exporting invalid or unknown ACIS structures.
- class ezdxf.acis.api.InvalidLinkStructure
Exception raised when the internal link structure is damaged.
Entities
A document (sat.pdf) about the basic ACIS 7.0 file format is floating in the internet.
This section contains the additional information about the entities, I got from analyzing the SAT data extracted from DXF files exported by BricsCAD.
This documentation ignores the differences to the ACIS format prior to version 7.0 and all this differences are handled internally.
Writing support for ACIS version < 7.0 is not required because all CAD applications should be able to process version 7.0, even if embedded in a very old DXF R2000 format (tested with Autodesk TrueView, BricsCAD and Nemetschek Allplan).
The first goal is to document the entities which are required to represent
a geometry as flat polygonal faces (polyhedron), which can be converted into
a MeshBuilder object.
Topology Entities:
Geometry Entities:
- ezdxf.acis.entities.NONE_REF
Special sentinel entity which supports the
typeattribute and theis_noneproperty. Represents all unset entities. Use this idiom on any entity type to check if an entity is unset:if entity.is_none: ...
AcisEntity
Transform
- class ezdxf.acis.entities.Transform(AcisEntity)
Represents an affine transformation operation which transform the
bodyto the final location, size and rotation.- matrix
Transformation matrix of type
ezdxf.math.Matrix44.
Body
Pattern
- class ezdxf.acis.entities.Pattern(AcisEntity)
Not implemented.
Lump
- class ezdxf.acis.entities.Lump(AcisEntity)
The lump represents a connected entity and there can be multiple lumps in a
Body. Multiple lumps are linked together by thenext_lumpattribute which points to the next lump entity the last lump has aNONE_REFas next lump. Thebodyattribute references to the parentBodyentity.
Wire
- class ezdxf.acis.entities.Wire(AcisEntity)
Not implemented.
Shell
Subshell
- class ezdxf.acis.entities.Subshell(AcisEntity)
Not implemented.
Face
- class ezdxf.acis.entities.Face(AcisEntity)
A face is the building block for
Shellentities. The boundary of a face is represented by one or moreLoopentities. The spatial geometry of the face is defined by thesurfaceobject, which is a bounded or unbounded parametric 3d surface (plane, ellipsoid, spline-surface, …).- sense
Boolean value of direction of the face normal with respect to the
Surfaceentity:True: “reversed” direction of the face normalFalse: “forward” for same direction of the face normal
- double_sided
Boolean value which indicates the sides of the face:
True: the face is part of a hollow object and has two sides.False: the face is part of a solid object and has only one side which points away from the “material”.
- containment
Unknown meaning.
If
double_sidedisTrue:Trueis “in”Falseis “out”
Loop
- class ezdxf.acis.entities.Loop(AcisEntity)
A loop represents connected coedges which are building the boundaries of a
Face, there can be multiple loops for a single face e.g. faces can contain holes. Thecoedgeattribute references the firstCoedgeof the loop, the additional coedges are linked to this firstCoedge. In closed loops the coedges are organized as a circular list, in open loops the last coedge references theNONE_REFentity asnext_coedgeand the first coedge references theNONE_REFasprev_coedge.
Coedge
- class ezdxf.acis.entities.Coedge(AcisEntity)
The coedges are a double linked list where
next_coedgepoints to the nextCoedgeandprev_coedgeto the previousCoedge.The
partner_coedgeattribute references the first partnerCoedgeof an adjacentFace, the partner edges are organized as a circular list. In a manifold closed surface eachFaceis connected to one partner face by anCoedge. In a non-manifold surface a face can have more than one partner face.- next_coedge
References the next
Coedge, reference theNONE_REFif it is the last coedge in an openLoop.
- prev_coedge
References the previous
Coedge, reference theNONE_REFif it is the first coedge in an openLoop.
Edge
- class ezdxf.acis.entities.Edge(AcisEntity)
The
Edgeentity represents the physical edge of an object. Its geometry is defined by the bounded portion of a parametric space curve. This bounds are stored as object-spaceVertexentities.- start_vertex
The start
Vertexof the space-curve in object coordinates, ifNONE_REFthe curve is unbounded in this direction.
- start_param
The parametric starting bound for the parametric curve. Evaluating the
curvefor this parameter should return the coordinates of thestart_vertex.
- end_vertex
The end
Vertexof the space-curve in object coordinates, ifNONE_REFthe curve is unbounded in this direction.
- end_param
The parametric end bound for the parametric curve.
- curve
The parametric space-curve which defines this edge. The curve can be the
NULL_REFwhile bothVertexentities are the same vertex. In this case theEdgerepresents an single point like the apex of a cone.
- sense
Boolean value which indicates the direction of the edge:
True: the edge has the “reversed” direction as the underlying curveFalse: the edge has the same direction as the underlying curve (“forward”)
- convexity
Unknown meaning, always the string “unknown”.
Vertex
Surface
- class ezdxf.acis.entities.Surface(AcisEntity)
Abstract base class for all parametric surfaces.
The parameterization of any
Surfacemaps a 2D rectangle (u, v parameters) into the spatial object-space (x, y, z).- u_bounds
Tuple of (start bound, end bound) parameters as two floats which define the bounds of the parametric surface in the u-direction, one or both values can be
math.infwhich indicates an unbounded state of the surface in that direction.
- v_bounds
Tuple of (start bound, end bound) parameters as two floats which define the bounds of the parametric surface in the v-direction, one or both values can be
math.infwhich indicates an unbounded state of the surface in that direction.
Plane
Curve
- class ezdxf.acis.entities.Curve(AcisEntity)
Abstract base class for all parametric curves.
The parameterization of any
Curvemaps a 1D line (the parameter) into the spatial object-space (x, y, z).- bounds
Tuple of (start bound, end bound) parameters as two floats which define the bounds of the parametric curve, one or both values can be
math.infwhich indicates an unbounded state of the curve in that direction.
StraightCurve
PCurve
- class ezdxf.acis.entities.PCurve(AcisEntity)
Not implemented.