Core
Math core module: ezdxf.math
These are the core math functions and classes which should be imported from
ezdxf.math.
Utility Functions
Returns the counter-clockwise angle span from start to end in degrees. |
|
Returns the counter-clockwise angle span from start to end in radians. |
|
Returns the chord length for an arc defined by radius and the sagitta. |
|
Returns the count of required segments for the approximation of an arc for a given maximum sagitta. |
|
Returns the area of a polygon. |
|
Returns the closest point to a give base point. |
|
Returns the counter-clockwise params span of an elliptic arc from start- to end param. |
|
Returns |
|
Returns |
|
Returns an open (clamped) uniform knot vector for a B-spline of order and count control points. |
|
Returns the count of required knot-values for a B-spline of order and count control points. |
|
Returns an uniform knot vector for a B-spline of order and count control points. |
|
Extended rounding function. |
|
Transform GPS (long/lat) to World Mercator. |
|
Transform World Mercator to GPS. |
- ezdxf.math.closest_point(base: UVec, points: Iterable[TypeAliasForwardRef('UVec')]) Vec3 | None
Returns the closest point to a give base point.
- ezdxf.math.uniform_knot_vector(count: int, order: int, normalize=False) list[float]
Returns an uniform knot vector for a B-spline of order and count control points.
order = degree + 1
- Parameters:
count – count of control points
order – spline order
normalize – normalize values in range [0, 1] if
True
- ezdxf.math.open_uniform_knot_vector(count: int, order: int, normalize=False) list[float]
Returns an open (clamped) uniform knot vector for a B-spline of order and count control points.
order = degree + 1
- Parameters:
count – count of control points
order – spline order
normalize – normalize values in range [0, 1] if
True
- ezdxf.math.required_knot_values(count: int, order: int) int
Returns the count of required knot-values for a B-spline of order and count control points.
- Parameters:
count – count of control points, in text-books referred as “n + 1”
order – order of B-Spline, in text-books referred as “k”
Relationship:
“p” is the degree of the B-spline, text-book notation.
k = p + 1
2 ≤ k ≤ n + 1
- ezdxf.math.xround(value: float, rounding: float = 0.) float
Extended rounding function.
The argument rounding defines the rounding limit:
0
remove fraction
0.1
round next to x.1, x.2, … x.0
0.25
round next to x.25, x.50, x.75 or x.00
0.5
round next to x.5 or x.0
1.0
round to a multiple of 1: remove fraction
2.0
round to a multiple of 2: xxx2, xxx4, xxx6 …
5.0
round to a multiple of 5: xxx5 or xxx0
10.0
round to a multiple of 10: xx10, xx20, …
- Parameters:
value – float value to round
rounding – rounding limit
- ezdxf.math.area(vertices: Iterable[TypeAliasForwardRef('UVec')]) float
Returns the area of a polygon.
Returns the projected area in the xy-plane for any vertices (z-axis will be ignored).
- ezdxf.math.arc_angle_span_deg(start: float, end: float) float
Returns the counter-clockwise angle span from start to end in degrees.
Returns the angle span in the range of [0, 360], 360 is a full circle. Full circle handling is a special case, because normalization of angles which describe a full circle would return 0 if treated as regular angles. e.g. (0, 360) → 360, (0, -360) → 360, (180, -180) → 360. Input angles with the same value always return 0 by definition: (0, 0) → 0, (-180, -180) → 0, (360, 360) → 0.
- ezdxf.math.arc_angle_span_rad(start: float, end: float) float
Returns the counter-clockwise angle span from start to end in radians.
Returns the angle span in the range of [0, 2π], 2π is a full circle. Full circle handling is a special case, because normalization of angles which describe a full circle would return 0 if treated as regular angles. e.g. (0, 2π) → 2π, (0, -2π) → 2π, (π, -π) → 2π. Input angles with the same value always return 0 by definition: (0, 0) → 0, (-π, -π) → 0, (2π, 2π) → 0.
- ezdxf.math.arc_segment_count(radius: float, angle: float, sagitta: float) int
Returns the count of required segments for the approximation of an arc for a given maximum sagitta.
- Parameters:
radius – arc radius
angle – angle span of the arc in radians
sagitta – max. distance from the center of an arc segment to the center of its chord
- ezdxf.math.arc_chord_length(radius: float, sagitta: float) float
Returns the chord length for an arc defined by radius and the sagitta.
- Parameters:
radius – arc radius
sagitta – distance from the center of the arc to the center of its base
- ezdxf.math.ellipse_param_span(start_param: float, end_param: float) float
Returns the counter-clockwise params span of an elliptic arc from start- to end param.
Returns the param span in the range [0, 2π], 2π is a full ellipse. Full ellipse handling is a special case, because normalization of params which describe a full ellipse would return 0 if treated as regular params. e.g. (0, 2π) → 2π, (0, -2π) → 2π, (π, -π) → 2π. Input params with the same value always return 0 by definition: (0, 0) → 0, (-π, -π) → 0, (2π, 2π) → 0.
Alias to function:
ezdxf.math.arc_angle_span_rad()
- ezdxf.math.has_matrix_2d_stretching(m: Matrix44) bool
Returns
Trueif matrix m performs a non-uniform xy-scaling. Uniform scaling is not stretching in this context.Does not check if the target system is a cartesian coordinate system, use the
Matrix44propertyis_cartesianfor that.
- ezdxf.math.has_matrix_3d_stretching(m: Matrix44) bool
Returns
Trueif matrix m performs a non-uniform xyz-scaling. Uniform scaling is not stretching in this context.Does not check if the target system is a cartesian coordinate system, use the
Matrix44propertyis_cartesianfor that.
- ezdxf.math.gps_to_world_mercator(longitude: float, latitude: float) tuple[float, float]
Transform GPS (long/lat) to World Mercator.
Transform WGS84 EPSG:4326 location given as latitude and longitude in decimal degrees as used by GPS into World Mercator cartesian 2D coordinates in meters EPSG:3395.
- Parameters:
longitude – represents the longitude value (East-West) in decimal degrees
latitude – represents the latitude value (North-South) in decimal degrees.
Added in version 1.3.0.
- ezdxf.math.world_mercator_to_gps(x: float, y: float, tol: float = 1e-6) tuple[float, float]
Transform World Mercator to GPS.
Transform WGS84 World Mercator EPSG:3395 location given as cartesian 2D coordinates x, y in meters into WGS84 decimal degrees as longitude and latitude EPSG:4326 as used by GPS.
- Parameters:
x – coordinate WGS84 World Mercator
y – coordinate WGS84 World Mercator
tol – accuracy for latitude calculation
Added in version 1.3.0.
2D Graphic Functions
Returns the 2D convex hull of given points. |
|
Returns the normal distance from point to 2D line defined by start- and end point. |
|
Returns the intersection points for two polylines as list of |
|
Compute the intersection of two lines in the xy-plane. |
|
Returns |
|
Returns |
|
Test if point is inside polygon. |
|
Returns |
|
Returns |
|
Yields vertices of the offset line to the shape defined by vertices. |
|
Returns |
|
The Rytz’s axis construction is a basic method of descriptive Geometry to find the axes, the semi-major axis and semi-minor axis, starting from two conjugated half-diameters. |
- ezdxf.math.convex_hull_2d(points: Iterable[TypeAliasForwardRef('UVec')]) list[Vec2]
Returns the 2D convex hull of given points.
Returns a closed polyline, first vertex is equal to the last vertex.
- Parameters:
points – iterable of points, z-axis is ignored
- ezdxf.math.distance_point_line_2d(point: Vec2, start: Vec2, end: Vec2) float
Returns the normal distance from point to 2D line defined by start- and end point.
- ezdxf.math.intersect_polylines_2d(p1: Sequence[Vec2], p2: Sequence[Vec2], abs_tol=1e-10) list[Vec2]
Returns the intersection points for two polylines as list of
Vec2objects, the list is empty if no intersection points exist. Does not return self intersection points of p1 or p2. Duplicate intersection points are removed from the result list, but the list does not have a particular order! You can sort the result list byresult.sort()to introduce an order.
- ezdxf.math.intersection_line_line_2d(line1: Sequence[Vec2], line2: Sequence[Vec2], virtual=True, abs_tol=TOLERANCE) Vec2 | None
Compute the intersection of two lines in the xy-plane.
- Parameters:
line1 – start- and end point of first line to test e.g. ((x1, y1), (x2, y2)).
line2 – start- and end point of second line to test e.g. ((x3, y3), (x4, y4)).
virtual –
Truereturns any intersection point,Falsereturns only real intersection points.abs_tol – tolerance for intersection test.
- Returns:
Noneif there is no intersection point (parallel lines) or intersection point asVec2
- ezdxf.math.is_axes_aligned_rectangle_2d(points: list[Vec2]) bool
Returns
Trueif the given points represent a rectangle aligned with the coordinate system axes.The sides of the rectangle must be parallel to the x- and y-axes of the coordinate system. The rectangle can be open or closed (first point == last point) and oriented clockwise or counter-clockwise. Only works with 4 or 5 vertices, rectangles that have sides with collinear edges are not considered rectangles.
Added in version 1.2.0.
- ezdxf.math.is_convex_polygon_2d(polygon: list[Vec2], *, strict=False, epsilon=1e-6) bool
Returns
Trueif the 2D polygon is convex.This function supports open and closed polygons with clockwise or counter-clockwise vertex orientation.
Coincident vertices will always be skipped and if argument strict is
True, polygons with collinear vertices are not considered as convex.This solution works only for simple non-self-intersecting polygons!
- ezdxf.math.is_point_in_polygon_2d(point: Vec2, polygon: list[Vec2], abs_tol=TOLERANCE) int
Test if point is inside polygon. Returns +1 for inside, 0 for on the boundary and -1 for outside.
Supports convex and concave polygons with clockwise or counter-clockwise oriented polygon vertices. Does not raise an exception for degenerated polygons.
- ezdxf.math.is_point_left_of_line(point: Vec2, start: Vec2, end: Vec2, colinear=False) bool
Returns
Trueif point is “left of line” defined by start- and end point, a colinear point is also “left of line” if argument colinear isTrue.
- ezdxf.math.is_point_on_line_2d(point: Vec2, start: Vec2, end: Vec2, ray=True, abs_tol=TOLERANCE) bool
Returns
Trueif point is on line.
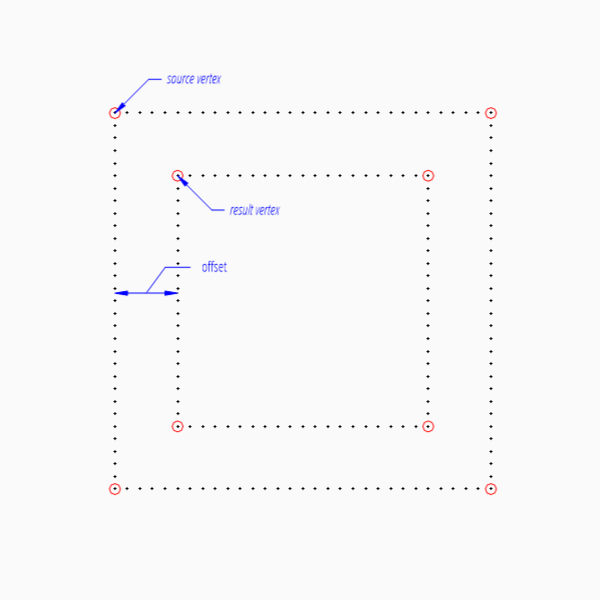
- ezdxf.math.offset_vertices_2d(vertices: Iterable[TypeAliasForwardRef('UVec')], offset: float, closed: bool = False) Iterable[Vec2]
Yields vertices of the offset line to the shape defined by vertices. The source shape consist of straight segments and is located in the xy-plane, the z-axis of input vertices is ignored. Takes closed shapes into account if argument closed is
True, which yields intersection of first and last offset segment as first vertex for a closed shape. For closed shapes the first and last vertex can be equal, else an implicit closing segment from last to first vertex is added. A shape with equal first and last vertex is not handled automatically as closed shape.Warning
Adjacent collinear segments in opposite directions, same as a turn by 180 degree (U-turn), leads to unexpected results.
- Parameters:
vertices – source shape defined by vertices
offset – line offset perpendicular to direction of shape segments defined by vertices order, offset >
0is ‘left’ of line segment, offset <0is ‘right’ of line segmentclosed –
Trueto handle as closed shape
source = [(0, 0), (3, 0), (3, 3), (0, 3)]
result = list(offset_vertices_2d(source, offset=0.5, closed=True))
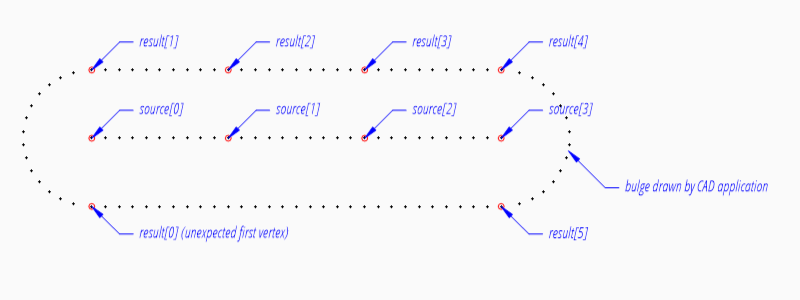
Example for a closed collinear shape, which creates 2 additional vertices and the first one has an unexpected location:
source = [(0, 0), (0, 1), (0, 2), (0, 3)]
result = list(offset_vertices_2d(source, offset=0.5, closed=True))
- ezdxf.math.point_to_line_relation(point: Vec2, start: Vec2, end: Vec2, abs_tol=TOLERANCE) int
Returns
-1if point is left line,+1if point is right of line and0if point is on the line. The line is defined by two vertices given as arguments start and end.
- ezdxf.math.rytz_axis_construction(d1: Vec3, d2: Vec3) tuple[Vec3, Vec3, float]
The Rytz’s axis construction is a basic method of descriptive Geometry to find the axes, the semi-major axis and semi-minor axis, starting from two conjugated half-diameters.
Source: Wikipedia
Given conjugated diameter d1 is the vector from center C to point P and the given conjugated diameter d2 is the vector from center C to point Q. Center of ellipse is always
(0, 0, 0). This algorithm works for 2D/3D vectors.
3D Graphic Functions
Returns a combined transformation matrix for translation, scaling and rotation about the z-axis. |
|
Returns the "best fit" normal for a plane defined by three or more vertices. |
|
Convert multiple quadratic or cubic Bèzier curves into a single cubic B-spline. |
|
Creates a closed uniform (periodic) B-spline curve (open curve). |
|
Returns the |
|
Returns a cubic Bèzier curve |
|
Returns an approximation for a circular 2D arc by multiple cubic Bézier-curves. |
|
Returns an approximation for an elliptic arc by multiple cubic Bézier-curves. |
|
Returns an interpolation curve for given data points as multiple cubic Bézier-curves. |
|
Returns the normal distance from a point to a 3D line. |
|
Estimate tangent magnitude of start- and end tangents. |
|
Estimate tangents for curve defined by given fit points. |
|
Returns a cubic |
|
Returns a cubic |
|
B-spline interpolation by the Global Curve Interpolation. |
|
Return |
|
Returns the intersection points for two polylines as list of |
|
Returns the intersection point of two 3D lines, returns |
|
Returns the intersection point of the 3D line form start to end and the given polygon. |
|
Returns the intersection point of the infinite 3D ray defined by origin and the direction vector and the given polygon. |
|
Calculate intersection of two 3D rays, returns a 0-tuple for parallel rays, a 1-tuple for intersecting rays and a 2-tuple for not intersecting and not parallel rays with points of the closest approach on each ray. |
|
Returns |
|
Returns |
|
Returns count evenly spaced vertices from start to end. |
|
B-spline interpolation by 'Local Cubic Curve Interpolation', which creates B-spline from fit points and estimated tangent direction at start-, end- and passing points. |
|
Returns normal vector for 3 points, which is the normalized cross product for: |
|
Creates an open uniform (periodic) B-spline curve (open curve). |
|
Returns the |
|
Returns a quadratic Bèzier curve |
|
Convert quadratic Bèzier curves ( |
|
Returns a rational B-splines for a circular 2D arc. |
|
Returns a rational B-splines for an elliptic arc. |
|
Safe function to detect the normal vector for a face or polygon defined by 3 or more vertices. |
|
Calculate the spherical envelope for the given points. |
|
Split a Bèzier curve at parameter t. |
|
Split a convex polygon by the given plane. |
|
Subdivides faces by subdividing edges and adding a center vertex. |
|
Subdivides faces into triangles by adding a center vertex. |
See also
The free online book 3D Math Primer for Graphics and Game Development is a very good resource for learning vector math and other graphic related topics, it is easy to read for beginners and especially targeted to programmers.
- ezdxf.math.basic_transformation(move: UVec = (0, 0, 0), scale: UVec = (1, 1, 1), z_rotation: float = 0) Matrix44
Returns a combined transformation matrix for translation, scaling and rotation about the z-axis.
- Parameters:
move – translation vector
scale – x-, y- and z-axis scaling as float triplet, e.g. (2, 2, 1)
z_rotation – rotation angle about the z-axis in radians
- ezdxf.math.best_fit_normal(vertices: Iterable[TypeAliasForwardRef('UVec')]) Vec3
Returns the “best fit” normal for a plane defined by three or more vertices. This function tolerates imperfect plane vertices. Safe function to detect the extrusion vector of flat arbitrary polygons.
- ezdxf.math.bezier_to_bspline(curves: Iterable[Bezier3P | Bezier4P]) BSpline
Convert multiple quadratic or cubic Bèzier curves into a single cubic B-spline.
For good results the curves must be lined up seamlessly, i.e. the starting point of the following curve must be the same as the end point of the previous curve. G1 continuity or better at the connection points of the Bézier curves is required to get best results.
- ezdxf.math.closed_uniform_bspline(control_points: Iterable[TypeAliasForwardRef('UVec')], order: int = 4, weights: Iterable[float] | None = None) BSpline
Creates a closed uniform (periodic) B-spline curve (open curve).
This B-spline does not pass any of the control points.
- Parameters:
control_points – iterable of control points as
Vec3compatible objectsorder – spline order (degree + 1)
weights – iterable of weight values
- ezdxf.math.cubic_bezier_bbox(curve: Bezier4P, *, abs_tol=1e-12) BoundingBox
Returns the
BoundingBoxof a cubic Bézier curve of typeBezier4P.
- ezdxf.math.cubic_bezier_from_3p(p1: UVec, p2: UVec, p3: UVec) Bezier4P
Returns a cubic Bèzier curve
Bezier4Pfrom three points. The curve starts at p1, goes through p2 and ends at p3. (source: pomax-2)
- ezdxf.math.cubic_bezier_from_arc(center: UVec = (0, 0, 0), radius: float = 1, start_angle: float = 0, end_angle: float = 360, segments: int = 1) Iterator[Bezier4P[Vec3]]
Returns an approximation for a circular 2D arc by multiple cubic Bézier-curves.
- Parameters:
center – circle center as
Vec3compatible objectradius – circle radius
start_angle – start angle in degrees
end_angle – end angle in degrees
segments – count of Bèzier-curve segments, at least one segment for each quarter (90 deg), 1 for as few as possible.
- ezdxf.math.cubic_bezier_from_ellipse(ellipse: ConstructionEllipse, segments: int = 1) Iterator[Bezier4P[Vec3]]
Returns an approximation for an elliptic arc by multiple cubic Bézier-curves.
- Parameters:
ellipse – ellipse parameters as
ConstructionEllipseobjectsegments – count of Bèzier-curve segments, at least one segment for each quarter (π/2), 1 for as few as possible.
- ezdxf.math.cubic_bezier_interpolation(points: Iterable[TypeAliasForwardRef('UVec')]) Iterable[Bezier4P[Vec3]]
Returns an interpolation curve for given data points as multiple cubic Bézier-curves. Returns n-1 cubic Bézier-curves for n given data points, curve i goes from point[i] to point[i+1].
- Parameters:
points – data points
- ezdxf.math.distance_point_line_3d(point: Vec3, start: Vec3, end: Vec3) float
Returns the normal distance from a point to a 3D line.
- Parameters:
point – point to test
start – start point of the 3D line
end – end point of the 3D line
- ezdxf.math.estimate_end_tangent_magnitude(points: list[Vec3], method: str = 'chord') tuple[float, float]
Estimate tangent magnitude of start- and end tangents.
Available estimation methods:
“chord”: total chord length, curve approximation by straight segments
“arc”: total arc length, curve approximation by arcs
“bezier-n”: total length from cubic bezier curve approximation, n segments per section
- Parameters:
points – start-, end- and passing points of curve
method – tangent magnitude estimation method
- ezdxf.math.estimate_tangents(points: list[Vec3], method: str = '5-points', normalize=True) list[Vec3]
Estimate tangents for curve defined by given fit points. Calculated tangents are normalized (unit-vectors).
Available tangent estimation methods:
“3-points”: 3 point interpolation
“5-points”: 5 point interpolation
“bezier”: tangents from an interpolated cubic bezier curve
“diff”: finite difference
- Parameters:
points – start-, end- and passing points of curve
method – tangent estimation method
normalize – normalize tangents if
True
- Returns:
tangents as list of
Vec3objects
- ezdxf.math.fit_points_to_cad_cv(fit_points: Iterable[TypeAliasForwardRef('UVec')], tangents: Iterable[TypeAliasForwardRef('UVec')] | None = None) BSpline
Returns a cubic
BSplinefrom fit points as close as possible to common CAD applications like BricsCAD.There exist infinite numerical correct solution for this setup, but some facts are known:
CAD applications use the global curve interpolation with start- and end derivatives if the end tangents are defined otherwise the equation system will be completed by setting the second derivatives of the start and end point to 0, for more information read this answer on stackoverflow: https://stackoverflow.com/a/74863330/6162864
The degree of the B-spline is always 3 regardless which degree is stored in the SPLINE entity, this is only valid for B-splines defined by fit points
Knot parametrization method is “chord”
Knot distribution is “natural”
- Parameters:
fit_points – points the spline is passing through
tangents – start- and end tangent, default is autodetect
- ezdxf.math.fit_points_to_cubic_bezier(fit_points: Iterable[TypeAliasForwardRef('UVec')]) BSpline
Returns a cubic
BSplinefrom fit points without end tangents.This function uses the cubic Bèzier interpolation to create multiple Bèzier curves and combine them into a single B-spline, this works for short simple splines better than the
fit_points_to_cad_cv(), but is worse for longer and more complex splines.- Parameters:
fit_points – points the spline is passing through
- ezdxf.math.global_bspline_interpolation(fit_points: Iterable[TypeAliasForwardRef('UVec')], degree: int = 3, tangents: Iterable[TypeAliasForwardRef('UVec')] | None = None, method: str = 'chord') BSpline
B-spline interpolation by the Global Curve Interpolation. Given are the fit points and the degree of the B-spline. The function provides 3 methods for generating the parameter vector t:
“uniform”: creates a uniform t vector, from 0 to 1 evenly spaced, see uniform method
“chord”, “distance”: creates a t vector with values proportional to the fit point distances, see chord length method
“centripetal”, “sqrt_chord”: creates a t vector with values proportional to the fit point sqrt(distances), see centripetal method
“arc”: creates a t vector with values proportional to the arc length between fit points.
It is possible to constraint the curve by tangents, by start- and end tangent if only two tangents are given or by one tangent for each fit point.
If tangents are given, they represent 1st derivatives and should be scaled if they are unit vectors, if only start- and end tangents given the function
estimate_end_tangent_magnitude()helps with an educated guess, if all tangents are given, scaling by chord length is a reasonable choice (Piegl & Tiller).- Parameters:
fit_points – fit points of B-spline, as list of
Vec3compatible objectstangents – if only two vectors are given, take the first and the last vector as start- and end tangent constraints or if for all fit points a tangent is given use all tangents as interpolation constraints (optional)
degree – degree of B-spline
method – calculation method for parameter vector t
- Returns:
- ezdxf.math.have_bezier_curves_g1_continuity(b1: Bezier3P | Bezier4P, b2: Bezier3P | Bezier4P, g1_tol: float = 1e-4) bool
Return
Trueif the given adjacent Bézier curves have G1 continuity.
- ezdxf.math.intersect_polylines_3d(p1: Sequence[Vec3], p2: Sequence[Vec3], abs_tol=1e-10) list[Vec3]
Returns the intersection points for two polylines as list of
Vec3objects, the list is empty if no intersection points exist. Does not return self intersection points of p1 or p2. Duplicate intersection points are removed from the result list, but the list does not have a particular order! You can sort the result list byresult.sort()to introduce an order.
- ezdxf.math.intersection_line_line_3d(line1: Sequence[Vec3], line2: Sequence[Vec3], virtual: bool = True, abs_tol: float = 1e-10) Vec3 | None
Returns the intersection point of two 3D lines, returns
Noneif lines do not intersect.
- ezdxf.math.intersection_line_polygon_3d(start: Vec3, end: Vec3, polygon: Iterable[Vec3], *, coplanar=True, boundary=True, abs_tol=PLANE_EPSILON) Vec3 | None
Returns the intersection point of the 3D line form start to end and the given polygon.
- Parameters:
start – start point of 3D line as
Vec3end – end point of 3D line as
Vec3polygon – 3D polygon as iterable of
Vec3coplanar – if
Truea coplanar start- or end point as intersection point is validboundary – if
Truean intersection point at the polygon boundary line is validabs_tol – absolute tolerance for comparisons
- ezdxf.math.intersection_ray_polygon_3d(origin: Vec3, direction: Vec3, polygon: Iterable[Vec3], *, boundary=True, abs_tol=PLANE_EPSILON) Vec3 | None
Returns the intersection point of the infinite 3D ray defined by origin and the direction vector and the given polygon.
- ezdxf.math.intersection_ray_ray_3d(ray1: Sequence[Vec3], ray2: Sequence[Vec3], abs_tol=TOLERANCE) Sequence[Vec3]
Calculate intersection of two 3D rays, returns a 0-tuple for parallel rays, a 1-tuple for intersecting rays and a 2-tuple for not intersecting and not parallel rays with points of the closest approach on each ray.
- ezdxf.math.is_planar_face(face: Sequence[Vec3], abs_tol=1e-9) bool
Returns
Trueif sequence of vectors is a planar face.- Parameters:
face – sequence of
Vec3objectsabs_tol – tolerance for normals check
- ezdxf.math.is_vertex_order_ccw_3d(vertices: list[Vec3], normal: Vec3) bool
Returns
Truewhen the given 3D vertices have a counter-clockwise order around the given normal vector.Works for convex and concave shapes. Does not check or care if all vertices are located in a flat plane or if the normal vector is really perpendicular to the shape, but the result may be incorrect in that cases.
- Parameters:
vertices (list) – corner vertices of a flat shape (polygon)
normal (Vec3) – normal vector of the shape
- Raises:
ValueError – input has less than 3 vertices
- ezdxf.math.linear_vertex_spacing(start: Vec3, end: Vec3, count: int) list[Vec3]
Returns count evenly spaced vertices from start to end.
- ezdxf.math.local_cubic_bspline_interpolation(fit_points: Iterable[TypeAliasForwardRef('UVec')], method: str = '5-points', tangents: Iterable[TypeAliasForwardRef('UVec')] | None = None) BSpline
B-spline interpolation by ‘Local Cubic Curve Interpolation’, which creates B-spline from fit points and estimated tangent direction at start-, end- and passing points.
Source: Piegl & Tiller: “The NURBS Book” - chapter 9.3.4
Available tangent estimation methods:
“3-points”: 3 point interpolation
“5-points”: 5 point interpolation
“bezier”: cubic bezier curve interpolation
“diff”: finite difference
or pass pre-calculated tangents, which overrides tangent estimation.
- ezdxf.math.normal_vector_3p(a: Vec3, b: Vec3, c: Vec3) Vec3
Returns normal vector for 3 points, which is the normalized cross product for:
a->b x a->c.
- ezdxf.math.open_uniform_bspline(control_points: Iterable[TypeAliasForwardRef('UVec')], order: int = 4, weights: Iterable[float] | None = None) BSpline
Creates an open uniform (periodic) B-spline curve (open curve).
This is an unclamped curve, which means the curve passes none of the control points.
- Parameters:
control_points – iterable of control points as
Vec3compatible objectsorder – spline order (degree + 1)
weights – iterable of weight values
- ezdxf.math.quadratic_bezier_bbox(curve: Bezier3P, *, abs_tol=1e-12) BoundingBox
Returns the
BoundingBoxof a quadratic Bézier curve of typeBezier3P.
- ezdxf.math.quadratic_bezier_from_3p(p1: UVec, p2: UVec, p3: UVec) Bezier3P
Returns a quadratic Bèzier curve
Bezier3Pfrom three points. The curve starts at p1, goes through p2 and ends at p3. (source: pomax-2)
- ezdxf.math.quadratic_to_cubic_bezier(curve: Bezier3P) Bezier4P
Convert quadratic Bèzier curves (
ezdxf.math.Bezier3P) into cubic Bèzier curves (ezdxf.math.Bezier4P).
- ezdxf.math.rational_bspline_from_arc(center: Vec3 = (0, 0), radius: float = 1, start_angle: float = 0, end_angle: float = 360, segments: int = 1) BSpline
Returns a rational B-splines for a circular 2D arc.
- Parameters:
center – circle center as
Vec3compatible objectradius – circle radius
start_angle – start angle in degrees
end_angle – end angle in degrees
segments – count of spline segments, at least one segment for each quarter (90 deg), default is 1, for as few as needed.
- ezdxf.math.rational_bspline_from_ellipse(ellipse: ConstructionEllipse, segments: int = 1) BSpline
Returns a rational B-splines for an elliptic arc.
- Parameters:
ellipse – ellipse parameters as
ConstructionEllipseobjectsegments – count of spline segments, at least one segment for each quarter (π/2), default is 1, for as few as needed.
- ezdxf.math.safe_normal_vector(vertices: Sequence[Vec3]) Vec3
Safe function to detect the normal vector for a face or polygon defined by 3 or more vertices.
- ezdxf.math.spherical_envelope(points: Sequence[TypeAliasForwardRef('UVec')]) tuple[Vec3, float]
Calculate the spherical envelope for the given points. Returns the centroid (a.k.a. geometric center) and the radius of the enclosing sphere.
Note
The result does not represent the minimal bounding sphere!
- ezdxf.math.split_bezier(control_points: Sequence[T], t: float) tuple[list[T], list[T]]
Split a Bèzier curve at parameter t.
Returns the control points for two new Bèzier curves of the same degree and type as the input curve. (source: pomax-1)
- ezdxf.math.split_polygon_by_plane(polygon: Iterable[Vec3], plane: Plane, *, coplanar=True, abs_tol=PLANE_EPSILON) tuple[Sequence[Vec3], Sequence[Vec3]]
Split a convex polygon by the given plane.
Returns a tuple of front- and back vertices (front, back). Returns also coplanar polygons if the argument coplanar is
True, the coplanar vertices goes into either front or back depending on their orientation with respect to this plane.
Transformation Classes
An optimized 4x4 transformation matrix. |
|
Establish an OCS for a given extrusion vector. |
|
Establish a user coordinate system (UCS). |
OCS Class
- class ezdxf.math.OCS(extrusion: UVec = Z_AXIS)
Establish an OCS for a given extrusion vector.
- Parameters:
extrusion – extrusion vector.
- ux
x-axis unit vector
- uy
y-axis unit vector
- uz
z-axis unit vector
- points_from_wcs(points: Iterable[TypeAliasForwardRef('UVec')]) Iterator[Vec3]
Returns iterable of OCS vectors from WCS points.
- points_to_wcs(points: Iterable[TypeAliasForwardRef('UVec')]) Iterator[Vec3]
Returns iterable of WCS vectors for OCS points.
- render_axis(layout: BaseLayout, length: float = 1, colors: RGB = RGB(1, 3, 5)) None
Render axis as 3D lines into a layout.
UCS Class
- class ezdxf.math.UCS(origin: UVec = (0, 0, 0), ux: TypeAliasForwardRef('UVec') | None = None, uy: TypeAliasForwardRef('UVec') | None = None, uz: TypeAliasForwardRef('UVec') | None = None)
Establish a user coordinate system (UCS). The UCS is defined by the origin and two unit vectors for the x-, y- or z-axis, all axis in WCS. The missing axis is the cross product of the given axis.
If x- and y-axis are
None: ux =(1, 0, 0), uy =(0, 1, 0), uz =(0, 0, 1).Unit vectors don’t have to be normalized, normalization is done at initialization, this is also the reason why scaling gets lost by copying or rotating.
- Parameters:
- ux
x-axis unit vector
- uy
y-axis unit vector
- uz
z-axis unit vector
- is_cartesian
Returns
Trueif cartesian coordinate system.
- points_to_wcs(points: Iterable[Vec3]) Iterator[Vec3]
Returns iterable of WCS vectors for UCS points.
- direction_to_wcs(vector: Vec3) Vec3
Returns WCS direction for UCS vector without origin adjustment.
- points_from_wcs(points: Iterable[Vec3]) Iterator[Vec3]
Returns iterable of UCS vectors from WCS points.
- points_to_ocs(points: Iterable[Vec3]) Iterator[Vec3]
Returns iterable of OCS vectors for UCS points.
The
OCSis defined by the z-axis of theUCS.- Parameters:
points – iterable of UCS vertices
- to_ocs_angle_deg(angle: float) float
Transforms angle from current UCS to the parent coordinate system (most likely the WCS) including the transformation to the OCS established by the extrusion vector
UCS.uz.- Parameters:
angle – in UCS in degrees
- transform(m: Matrix44) UCS
General inplace transformation interface, returns self (floating interface).
- Parameters:
m – 4x4 transformation matrix (
ezdxf.math.Matrix44)
- rotate(axis: UVec, angle: float) UCS
Returns a new rotated UCS, with the same origin as the source UCS. The rotation vector is located in the origin and has WCS coordinates e.g. (0, 0, 1) is the WCS z-axis as rotation vector.
- Parameters:
axis – arbitrary rotation axis as vector in WCS
angle – rotation angle in radians
- rotate_local_x(angle: float) UCS
Returns a new rotated UCS, rotation axis is the local x-axis.
- Parameters:
angle – rotation angle in radians
- rotate_local_y(angle: float) UCS
Returns a new rotated UCS, rotation axis is the local y-axis.
- Parameters:
angle – rotation angle in radians
- rotate_local_z(angle: float) UCS
Returns a new rotated UCS, rotation axis is the local z-axis.
- Parameters:
angle – rotation angle in radians
- shift(delta: UVec) UCS
Shifts current UCS by delta vector and returns self.
- Parameters:
delta – shifting vector
- moveto(location: UVec) UCS
Place current UCS at new origin location and returns self.
- Parameters:
location – new origin in WCS
- static from_x_axis_and_point_in_xy(origin: UVec, axis: UVec, point: UVec) UCS
Returns a new
UCSdefined by the origin, the x-axis vector and an arbitrary point in the xy-plane.
- static from_x_axis_and_point_in_xz(origin: UVec, axis: UVec, point: UVec) UCS
Returns a new
UCSdefined by the origin, the x-axis vector and an arbitrary point in the xz-plane.
- static from_y_axis_and_point_in_xy(origin: UVec, axis: UVec, point: UVec) UCS
Returns a new
UCSdefined by the origin, the y-axis vector and an arbitrary point in the xy-plane.
- static from_y_axis_and_point_in_yz(origin: UVec, axis: UVec, point: UVec) UCS
Returns a new
UCSdefined by the origin, the y-axis vector and an arbitrary point in the yz-plane.
- static from_z_axis_and_point_in_xz(origin: UVec, axis: UVec, point: UVec) UCS
Returns a new
UCSdefined by the origin, the z-axis vector and an arbitrary point in the xz-plane.
- static from_z_axis_and_point_in_yz(origin: UVec, axis: UVec, point: UVec) UCS
Returns a new
UCSdefined by the origin, the z-axis vector and an arbitrary point in the yz-plane.
- render_axis(layout: BaseLayout, length: float = 1, colors: RGB = RGB(1, 3, 5))
Render axis as 3D lines into a layout.
Matrix44
- class ezdxf.math.Matrix44(*args)
An optimized 4x4 transformation matrix.
The utility functions for constructing transformations and transforming vectors and points assumes that vectors are stored as row vectors, meaning when multiplied, transformations are applied left to right (e.g. vAB transforms v by A then by B).
Matrix44 initialization:
Matrix44()returns the identity matrix.Matrix44(values)values is an iterable with the 16 components of the matrix.Matrix44(row1, row2, row3, row4)four rows, each row with four values.
- __repr__() str
Returns the representation string of the matrix in row-major order:
Matrix44((col0, col1, col2, col3), (...), (...), (...))
- get_row(row: int) tuple[float, ...]
Get row as list of four float values.
- Parameters:
row – row index [0 .. 3]
- set_row(row: int, values: Sequence[float]) None
Sets the values in a row.
- Parameters:
row – row index [0 .. 3]
values – iterable of four row values
- get_col(col: int) tuple[float, ...]
Returns a column as a tuple of four floats.
- Parameters:
col – column index [0 .. 3]
- set_col(col: int, values: Sequence[float])
Sets the values in a column.
- Parameters:
col – column index [0 .. 3]
values – iterable of four column values
- classmethod scale(sx: float, sy: float | None = None, sz: float | None = None) Matrix44
Returns a scaling transformation matrix. If sy is
None, sy = sx, and if sz isNonesz = sx.
- classmethod translate(dx: float, dy: float, dz: float) Matrix44
Returns a translation matrix for translation vector (dx, dy, dz).
- classmethod x_rotate(angle: float) Matrix44
Returns a rotation matrix about the x-axis.
- Parameters:
angle – rotation angle in radians
- classmethod y_rotate(angle: float) Matrix44
Returns a rotation matrix about the y-axis.
- Parameters:
angle – rotation angle in radians
- classmethod z_rotate(angle: float) Matrix44
Returns a rotation matrix about the z-axis.
- Parameters:
angle – rotation angle in radians
- classmethod axis_rotate(axis: UVec, angle: float) Matrix44
Returns a rotation matrix about an arbitrary axis.
- Parameters:
axis – rotation axis as
(x, y, z)tuple orVec3objectangle – rotation angle in radians
- classmethod xyz_rotate(angle_x: float, angle_y: float, angle_z: float) Matrix44
Returns a rotation matrix for rotation about each axis.
- Parameters:
angle_x – rotation angle about x-axis in radians
angle_y – rotation angle about y-axis in radians
angle_z – rotation angle about z-axis in radians
- classmethod shear_xy(angle_x: float = 0, angle_y: float = 0) Matrix44
Returns a translation matrix for shear mapping (visually similar to slanting) in the xy-plane.
- Parameters:
angle_x – slanting angle in x direction in radians
angle_y – slanting angle in y direction in radians
- classmethod perspective_projection(left: float, right: float, top: float, bottom: float, near: float, far: float) Matrix44
Returns a matrix for a 2D projection.
- Parameters:
left – Coordinate of left of screen
right – Coordinate of right of screen
top – Coordinate of the top of the screen
bottom – Coordinate of the bottom of the screen
near – Coordinate of the near clipping plane
far – Coordinate of the far clipping plane
- classmethod perspective_projection_fov(fov: float, aspect: float, near: float, far: float) Matrix44
Returns a matrix for a 2D projection.
- Parameters:
fov – The field of view (in radians)
aspect – The aspect ratio of the screen (width / height)
near – Coordinate of the near clipping plane
far – Coordinate of the far clipping plane
- static chain(*matrices: Matrix44) Matrix44
Compose a transformation matrix from one or more matrices.
- static ucs(ux: Vec3 = X_AXIS, uy: Vec3 = Y_AXIS, uz: Vec3 = Z_AXIS, origin: Vec3 = NULLVEC) Matrix44
Returns a matrix for coordinate transformation from WCS to UCS. For transformation from UCS to WCS, transpose the returned matrix.
- Parameters:
ux – x-axis for UCS as unit vector
uy – y-axis for UCS as unit vector
uz – z-axis for UCS as unit vector
origin – UCS origin as location vector
- __hash__()
Return hash(self).
- __getitem__(index: tuple[int, int])
Get (row, column) element.
- __setitem__(index: tuple[int, int], value: float)
Set (row, column) element.
- __iter__() Iterator[float]
Iterates over all matrix values.
- rows() Iterator[tuple[float, ...]]
Iterate over rows as 4-tuples.
- columns() Iterator[tuple[float, ...]]
Iterate over columns as 4-tuples.
- __mul__(other: Matrix44) Matrix44
Returns a new matrix as result of the matrix multiplication with another matrix.
- transform_direction(vector: UVec, normalize=False) Vec3
Returns a transformed direction vector without translation.
- transform_vertices(vectors: Iterable[TypeAliasForwardRef('UVec')]) Iterator[Vec3]
Returns an iterable of transformed vertices.
- fast_2d_transform(points: Iterable[TypeAliasForwardRef('UVec')]) Iterator[Vec2]
Fast transformation of 2D points. For 3D input points the z-axis will be ignored. This only works reliable if only 2D transformations have been applied to the 4x4 matrix!
Profiling results - speed gains over
transform_vertices():pure Python code: ~1.6x
Python with C-extensions: less than 1.1x
PyPy 3.8: ~4.3x
But speed isn’t everything, returning the processed input points as
Vec2instances is another advantage.Added in version 1.1.
- transform_directions(vectors: Iterable[TypeAliasForwardRef('UVec')], normalize=False) Iterator[Vec3]
Returns an iterable of transformed direction vectors without translation.
- transpose() None
Swaps the rows for columns inplace.
- determinant() float
Returns determinant.
- inverse() None
Calculates the inverse of the matrix.
- Raises:
ZeroDivisionError – if matrix has no inverse.
- property is_cartesian: bool
Returns
Trueif target coordinate system is a right handed orthogonal coordinate system.
- property is_orthogonal: bool
Returns
Trueif target coordinate system has orthogonal axis.Does not check for left- or right handed orientation, any orientation of the axis valid.
Basic Construction Classes
3D bounding box. |
|
2D bounding box. |
|
Construction tool for 2D arcs. |
|
Construction tool for 2D rectangles. |
|
Construction tool for 2D circles. |
|
Construction tool for 3D ellipsis. |
|
Construction tool for 2D lines. |
|
Construction tool for 3D polylines. |
|
Construction tool for infinite 2D rays. |
|
Construction tool for 3D planes. |
|
Construction tools for 2D shapes. |
|
Immutable 2D vector class. |
|
Immutable 3D vector class. |
UVec
- class ezdxf.math.UVec
Type alias for
Union[Sequence[float], Vec2, Vec3]
Vec3
- class ezdxf.math.Vec3(*args)
Immutable 3D vector class.
This class is optimized for universality not for speed. Immutable means you can’t change (x, y, z) components after initialization:
v1 = Vec3(1, 2, 3) v2 = v1 v2.z = 7 # this is not possible, raises AttributeError v2 = Vec3(v2.x, v2.y, 7) # this creates a new Vec3() object assert v1.z == 3 # and v1 remains unchanged
Vec3initialization:Vec3(), returnsVec3(0, 0, 0)Vec3((x, y)), returnsVec3(x, y, 0)Vec3((x, y, z)), returnsVec3(x, y, z)Vec3(x, y), returnsVec3(x, y, 0)Vec3(x, y, z), returnsVec3(x, y, z)
Addition, subtraction, scalar multiplication and scalar division left and right-handed are supported:
v = Vec3(1, 2, 3) v + (1, 2, 3) == Vec3(2, 4, 6) (1, 2, 3) + v == Vec3(2, 4, 6) v - (1, 2, 3) == Vec3(0, 0, 0) (1, 2, 3) - v == Vec3(0, 0, 0) v * 3 == Vec3(3, 6, 9) 3 * v == Vec3(3, 6, 9) Vec3(3, 6, 9) / 3 == Vec3(1, 2, 3) -Vec3(1, 2, 3) == (-1, -2, -3)
Comparison between vectors and vectors or tuples is supported:
Vec3(1, 2, 3) < Vec3 (2, 2, 2) (1, 2, 3) < tuple(Vec3(2, 2, 2)) # conversion necessary Vec3(1, 2, 3) == (1, 2, 3) bool(Vec3(1, 2, 3)) is True bool(Vec3(0, 0, 0)) is False
- x
x-axis value
- y
y-axis value
- z
z-axis value
- xy
Vec3 as
(x, y, 0), projected on the xy-plane.
- xyz
Vec3 as
(x, y, z)tuple.
- magnitude
Length of vector.
- magnitude_xy
Length of vector in the xy-plane.
- magnitude_square
Square length of vector.
- is_null
Vec3(0, 0, 0). Has a fixed absolute testing tolerance of 1e-12!- Type:
Trueif all components are close to zero
- angle
Angle between vector and x-axis in the xy-plane in radians.
- angle_deg
Returns angle of vector and x-axis in the xy-plane in degrees.
- spatial_angle
Spatial angle between vector and x-axis in radians.
- spatial_angle_deg
Spatial angle between vector and x-axis in degrees.
- __str__() str
Return
'(x, y, z)'as string.
- __repr__() str
Return
'Vec3(x, y, z)'as string.
- __len__() int
Returns always
3.
- __hash__() int
Returns hash value of vector, enables the usage of vector as key in
setanddict.
- __getitem__(index: int) float
Support for indexing:
v[0] is v.x
v[1] is v.y
v[2] is v.z
- __iter__() Iterator[float]
Returns iterable of x-, y- and z-axis.
- __abs__() float
Returns length (magnitude) of vector.
- replace(x: float | None = None, y: float | None = None, z: float | None = None) Vec3
Returns a copy of vector with replaced x-, y- and/or z-axis.
- classmethod generate(items: Iterable[TypeAliasForwardRef('UVec')]) Iterator[Vec3]
Returns an iterable of
Vec3objects.
- classmethod list(items: Iterable[TypeAliasForwardRef('UVec')]) list[Vec3]
Returns a list of
Vec3objects.
- classmethod tuple(items: Iterable[TypeAliasForwardRef('UVec')]) Sequence[Vec3]
Returns a tuple of
Vec3objects.
- classmethod from_angle(angle: float, length: float = 1.0) Vec3
Returns a
Vec3object from angle in radians in the xy-plane, z-axis =0.
- classmethod from_deg_angle(angle: float, length: float = 1.0) Vec3
Returns a
Vec3object from angle in degrees in the xy-plane, z-axis =0.
- orthogonal(ccw: bool = True) Vec3
Returns orthogonal 2D vector, z-axis is unchanged.
- Parameters:
ccw – counter-clockwise if
Trueelse clockwise
- lerp(other: UVec, factor=0.5) Vec3
Returns linear interpolation between self and other.
- Parameters:
other – end point as
Vec3compatible objectfactor – interpolation factor (0 = self, 1 = other, 0.5 = mid point)
- is_parallel(other: Vec3, *, rel_tol: float = 1e-9, abs_tol: float = 1e-12) bool
Returns
Trueif self and other are parallel to vectors.
- isclose(other: UVec, *, rel_tol: float = 1e-9, abs_tol: float = 1e-12) bool
Returns
Trueif self is close to other. Usesmath.isclose()to compare all axis.Learn more about the
math.isclose()function in PEP 485.
- __bool__() bool
Returns
Trueif vector is not (0, 0, 0).
- angle_about(base: UVec, target: UVec) float
Returns counter-clockwise angle in radians about self from base to target when projected onto the plane defined by self as the normal vector.
- Parameters:
base – base vector, defines angle 0
target – target vector
- angle_between(other: UVec) float
Returns angle between self and other in radians. +angle is counter clockwise orientation.
- Parameters:
other –
Vec3compatible object
- rotate(angle: float) Vec3
Returns vector rotated about angle around the z-axis.
- Parameters:
angle – angle in radians
- ezdxf.math.X_AXIS
Vec3(1, 0, 0)
- ezdxf.math.Y_AXIS
Vec3(0, 1, 0)
- ezdxf.math.Z_AXIS
Vec3(0, 0, 1)
- ezdxf.math.NULLVEC
Vec3(0, 0, 0)
Vec2
Plane
- class ezdxf.math.Plane(normal: Vec3, distance: float)
Construction tool for 3D planes.
Represents a plane in 3D space as a normal vector and the perpendicular distance from the origin.
- normal
Normal vector of the plane.
- distance_from_origin
The (perpendicular) distance of the plane from origin (0, 0, 0).
- vector
Returns the location vector.
- signed_distance_to(v: Vec3) float
Returns signed distance of vertex v to plane, if distance is > 0, v is in ‘front’ of plane, in direction of the normal vector, if distance is < 0, v is at the ‘back’ of the plane, in the opposite direction of the normal vector.
- is_coplanar_vertex(v: Vec3, abs_tol=1e-9) bool
Returns
Trueif vertex v is coplanar, distance from plane to vertex v is 0.
- is_coplanar_plane(p: Plane, abs_tol=1e-9) bool
Returns
Trueif plane p is coplanar, normal vectors in same or opposite direction.
- intersect_line(start: Vec3, end: Vec3, *, coplanar=True, abs_tol=PLANE_EPSILON) Vec3 | None
Returns the intersection point of the 3D line from start to end and this plane or
Noneif there is no intersection. If the argument coplanar isFalsethe start- or end point of the line are ignored as intersection points.
BoundingBox
- class ezdxf.math.BoundingBox(vertices: Iterable[TypeAliasForwardRef('UVec')] | None = None)
3D bounding box.
- Parameters:
vertices – iterable of
(x, y, z)tuples orVec3objects
- extmin
“lower left” corner of bounding box
- extmax
“upper right” corner of bounding box
- property is_empty: bool
Returns
Trueif the bounding box is empty or the bounding box has a size of 0 in any or all dimensions or is undefined.
- property has_data: bool
Returns
Trueif the bonding box has known limits.
- property size: T
Returns size of bounding box.
- property center: T
Returns center of bounding box.
- inside(vertex: UVec) bool
Returns
Trueif vertex is inside this bounding box.Vertices at the box border are inside!
- any_inside(vertices: Iterable[TypeAliasForwardRef('UVec')]) bool
Returns
Trueif any vertex is inside this bounding box.Vertices at the box border are inside!
- all_inside(vertices: Iterable[TypeAliasForwardRef('UVec')]) bool
Returns
Trueif all vertices are inside this bounding box.Vertices at the box border are inside!
- has_intersection(other: AbstractBoundingBox[T]) bool
Returns
Trueif this bounding box intersects with other but does not include touching bounding boxes, see alsohas_overlap():bbox1 = BoundingBox([(0, 0, 0), (1, 1, 1)]) bbox2 = BoundingBox([(1, 1, 1), (2, 2, 2)]) assert bbox1.has_intersection(bbox2) is False
- has_overlap(other: AbstractBoundingBox[T]) bool
Returns
Trueif this bounding box intersects with other but in contrast tohas_intersection()includes touching bounding boxes too:bbox1 = BoundingBox([(0, 0, 0), (1, 1, 1)]) bbox2 = BoundingBox([(1, 1, 1), (2, 2, 2)]) assert bbox1.has_overlap(bbox2) is True
- contains(other: AbstractBoundingBox[T]) bool
Returns
Trueif the other bounding box is completely inside this bounding box.
- extend(vertices: Iterable[TypeAliasForwardRef('UVec')]) None
Extend bounds by vertices.
- Parameters:
vertices – iterable of vertices
- union(other: AbstractBoundingBox[T]) AbstractBoundingBox[T]
Returns a new bounding box as union of this and other bounding box.
- intersection(other: AbstractBoundingBox[T]) BoundingBox
Returns the bounding box of the intersection cube of both 3D bounding boxes. Returns an empty bounding box if the intersection volume is 0.
- rect_vertices() Sequence[Vec2]
Returns the corners of the bounding box in the xy-plane as
Vec2objects.
- grow(value: float) None
Grow or shrink the bounding box by an uniform value in x, y and z-axis. A negative value shrinks the bounding box. Raises
ValueErrorfor shrinking the size of the bounding box to zero or below in any dimension.
BoundingBox2d
- class ezdxf.math.BoundingBox2d(vertices: Iterable[TypeAliasForwardRef('UVec')] | None = None)
2D bounding box.
- Parameters:
vertices – iterable of
(x, y[, z])tuples orVec3objects
- extmin
“lower left” corner of bounding box
- extmax
“upper right” corner of bounding box
- property is_empty: bool
Returns
Trueif the bounding box is empty. The bounding box has a size of 0 in any or all dimensions or is undefined.
- property has_data: bool
Returns
Trueif the bonding box has known limits.
- property size: T
Returns size of bounding box.
- property center: T
Returns center of bounding box.
- inside(vertex: UVec) bool
Returns
Trueif vertex is inside this bounding box.Vertices at the box border are inside!
- any_inside(vertices: Iterable[TypeAliasForwardRef('UVec')]) bool
Returns
Trueif any vertex is inside this bounding box.Vertices at the box border are inside!
- all_inside(vertices: Iterable[TypeAliasForwardRef('UVec')]) bool
Returns
Trueif all vertices are inside this bounding box.Vertices at the box border are inside!
- has_intersection(other: AbstractBoundingBox[T]) bool
Returns
Trueif this bounding box intersects with other but does not include touching bounding boxes, see alsohas_overlap():bbox1 = BoundingBox2d([(0, 0), (1, 1)]) bbox2 = BoundingBox2d([(1, 1), (2, 2)]) assert bbox1.has_intersection(bbox2) is False
- has_overlap(other: AbstractBoundingBox[T]) bool
Returns
Trueif this bounding box intersects with other but in contrast tohas_intersection()includes touching bounding boxes too:bbox1 = BoundingBox2d([(0, 0), (1, 1)]) bbox2 = BoundingBox2d([(1, 1), (2, 2)]) assert bbox1.has_overlap(bbox2) is True
- contains(other: AbstractBoundingBox[T]) bool
Returns
Trueif the other bounding box is completely inside this bounding box.
- extend(vertices: Iterable[TypeAliasForwardRef('UVec')]) None
Extend bounds by vertices.
- Parameters:
vertices – iterable of vertices
- union(other: AbstractBoundingBox[T]) AbstractBoundingBox[T]
Returns a new bounding box as union of this and other bounding box.
- intersection(other: AbstractBoundingBox[T]) BoundingBox2d
Returns the bounding box of the intersection rectangle of both 2D bounding boxes. Returns an empty bounding box if the intersection area is 0.
ConstructionRay
- class ezdxf.math.ConstructionRay(p1: UVec, p2: TypeAliasForwardRef('UVec') | None = None, angle: float | None = None)
Construction tool for infinite 2D rays.
- Parameters:
p1 – definition point 1
p2 – ray direction as 2nd point or
Noneangle – ray direction as angle in radians or
None
- slope
Slope of ray or
Noneif vertical.
- angle
Angle between x-axis and ray in radians.
- angle_deg
Angle between x-axis and ray in degrees.
- is_vertical
Trueif ray is vertical (parallel to y-axis).
- is_horizontal
Trueif ray is horizontal (parallel to x-axis).
- __str__()
Return str(self).
- is_parallel(other: ConstructionRay) bool
Returns
Trueif rays are parallel.
- intersect(other: ConstructionRay) Vec2
Returns the intersection point as
(x, y)tuple of self and other.- Raises:
ParallelRaysError – if rays are parallel
- orthogonal(location: UVec) ConstructionRay
Returns orthogonal ray at location.
- bisectrix(other: ConstructionRay) ConstructionRay
Bisectrix between self and other.
- yof(x: float) float
Returns y-value of ray for x location.
- Raises:
ArithmeticError – for vertical rays
- xof(y: float) float
Returns x-value of ray for y location.
- Raises:
ArithmeticError – for horizontal rays
ConstructionLine
- class ezdxf.math.ConstructionLine(start: UVec, end: UVec)
Construction tool for 2D lines.
The
ConstructionLineclass is similar toConstructionRay, but has a start- and endpoint. The direction of line goes from start- to endpoint, “left of line” is always in relation to this line direction.- Parameters:
- bounding_box
bounding box of line as
BoundingBox2dobject.
- ray
collinear
ConstructionRay.
- is_vertical
Trueif line is vertical.
- is_horizontal
Trueif line is horizontal.
- __str__()
Return str(self).
- translate(dx: float, dy: float) None
Move line about dx in x-axis and about dy in y-axis.
- Parameters:
dx – translation in x-axis
dy – translation in y-axis
- length() float
Returns length of line.
- intersect(other: ConstructionLine, abs_tol: float = TOLERANCE) Vec2 | None
Returns the intersection point of to lines or
Noneif they have no intersection point.- Parameters:
other – other
ConstructionLineabs_tol – tolerance for distance check
- has_intersection(other: ConstructionLine, abs_tol: float = TOLERANCE) bool
Returns
Trueif has intersection with other line.
ConstructionCircle
- class ezdxf.math.ConstructionCircle(center: UVec, radius: float = 1.0)
Construction tool for 2D circles.
- Parameters:
center – center point as
Vec2compatible objectradius – circle radius > 0
- radius
radius as float
- bounding_box
2D bounding box of circle as
BoundingBox2dobject.
- static from_3p(p1: UVec, p2: UVec, p3: UVec) ConstructionCircle
Creates a circle from three points, all points have to be compatible to
Vec2class.
- __str__() str
Returns string representation of circle “ConstructionCircle(center, radius)”.
- translate(dx: float, dy: float) None
Move circle about dx in x-axis and about dy in y-axis.
- Parameters:
dx – translation in x-axis
dy – translation in y-axis
- point_at(angle: float) Vec2
Returns point on circle at angle as
Vec2object.- Parameters:
angle – angle in radians, angle goes counter clockwise around the z-axis, x-axis = 0 deg.
- vertices(angles: Iterable[float]) Iterable[Vec2]
Yields vertices of the circle for iterable angles.
- Parameters:
angles – iterable of angles as radians, angle goes counter-clockwise around the z-axis, x-axis = 0 deg.
- flattening(sagitta: float) Iterator[Vec2]
Approximate the circle by vertices, argument sagitta is the max. distance from the center of an arc segment to the center of its chord. Returns a closed polygon where the start vertex is coincident with the end vertex!
- tangent(angle: float) ConstructionRay
Returns tangent to circle at angle as
ConstructionRayobject.- Parameters:
angle – angle in radians
- intersect_ray(ray: ConstructionRay, abs_tol: float = 1e-10) Sequence[Vec2]
Returns intersection points of circle and ray as sequence of
Vec2objects.- Parameters:
ray – intersection ray
abs_tol – absolute tolerance for tests (e.g. test for tangents)
- Returns:
tuple of
Vec2objectstuple size
Description
0
no intersection
1
ray is a tangent to circle
2
ray intersects with the circle
- intersect_line(line: ConstructionLine, abs_tol: float = 1e-10) Sequence[Vec2]
Returns intersection points of circle and line as sequence of
Vec2objects.- Parameters:
line – intersection line
abs_tol – absolute tolerance for tests (e.g. test for tangents)
- Returns:
tuple of
Vec2objectstuple size
Description
0
no intersection
1
line intersects or touches the circle at one point
2
line intersects the circle at two points
- intersect_circle(other: ConstructionCircle, abs_tol: float = 1e-10) Sequence[Vec2]
Returns intersection points of two circles as sequence of
Vec2objects.- Parameters:
other – intersection circle
abs_tol – absolute tolerance for tests
- Returns:
tuple of
Vec2objectstuple size
Description
0
no intersection
1
circle touches the other circle at one point
2
circle intersects with the other circle
ConstructionArc
- class ezdxf.math.ConstructionArc(center: UVec = (0, 0), radius: float = 1.0, start_angle: float = 0.0, end_angle: float = 360.0, is_counter_clockwise: bool | None = True)
Construction tool for 2D arcs.
ConstructionArcrepresents a 2D arc in the xy-plane, use anUCSto place a DXFArcentity in 3D space, see methodadd_to_layout().Implements the 2D transformation tools:
translate(),scale_uniform()androtate_z()- Parameters:
center – center point as
Vec2compatible objectradius – radius
start_angle – start angle in degrees
end_angle – end angle in degrees
is_counter_clockwise – swaps start- and end angle if
False
- radius
radius as float
- start_angle
start angle in degrees
- end_angle
end angle in degrees
- angle_span
Returns angle span of arc from start- to end param.
- start_angle_rad
Returns the start angle in radians.
- end_angle_rad
Returns the end angle in radians.
- bounding_box
bounding box of arc as
BoundingBox2d.
- angles(num: int) Iterable[float]
Returns num angles from start- to end angle in degrees in counter-clockwise order.
All angles are normalized in the range from [0, 360).
- vertices(a: Iterable[float]) Iterable[Vec2]
Yields vertices on arc for angles in iterable a in WCS as location vectors.
- Parameters:
a – angles in the range from 0 to 360 in degrees, arc goes counter clockwise around the z-axis, WCS x-axis = 0 deg.
- tangents(a: Iterable[float]) Iterable[Vec2]
Yields tangents on arc for angles in iterable a in WCS as direction vectors.
- Parameters:
a – angles in the range from 0 to 360 in degrees, arc goes counter-clockwise around the z-axis, WCS x-axis = 0 deg.
- translate(dx: float, dy: float) ConstructionArc
Move arc about dx in x-axis and about dy in y-axis, returns self (floating interface).
- Parameters:
dx – translation in x-axis
dy – translation in y-axis
- scale_uniform(s: float) ConstructionArc
Scale arc inplace uniform about s in x- and y-axis, returns self (floating interface).
- rotate_z(angle: float) ConstructionArc
Rotate arc inplace about z-axis, returns self (floating interface).
- Parameters:
angle – rotation angle in degrees
- classmethod from_2p_angle(start_point: UVec, end_point: UVec, angle: float, ccw: bool = True) ConstructionArc
Create arc from two points and enclosing angle. Additional precondition: arc goes by default in counter-clockwise orientation from start_point to end_point, can be changed by ccw =
False.
- classmethod from_2p_radius(start_point: UVec, end_point: UVec, radius: float, ccw: bool = True, center_is_left: bool = True) ConstructionArc
Create arc from two points and arc radius. Additional precondition: arc goes by default in counter-clockwise orientation from start_point to end_point can be changed by ccw =
False.The parameter center_is_left defines if the center of the arc is left or right of the line from start_point to end_point. Parameter ccw =
Falseswaps start- and end point, which also inverts the meaning ofcenter_is_left.
- classmethod from_3p(start_point: UVec, end_point: UVec, def_point: UVec, ccw: bool = True) ConstructionArc
Create arc from three points. Additional precondition: arc goes in counter-clockwise orientation from start_point to end_point.
- add_to_layout(layout: BaseLayout, ucs: UCS | None = None, dxfattribs=None) Arc
Add arc as DXF
Arcentity to a layout.Supports 3D arcs by using an UCS. An
ConstructionArcis always defined in the xy-plane, but by using an arbitrary UCS, the arc can be placed in 3D space, automatically OCS transformation included.- Parameters:
layout – destination layout as
BaseLayoutobjectucs – place arc in 3D space by
UCSobjectdxfattribs – additional DXF attributes for the ARC entity
- intersect_ray(ray: ConstructionRay, abs_tol: float = 1e-10) Sequence[Vec2]
Returns intersection points of arc and ray as sequence of
Vec2objects.- Parameters:
ray – intersection ray
abs_tol – absolute tolerance for tests (e.g. test for tangents)
- Returns:
tuple of
Vec2objectstuple size
Description
0
no intersection
1
line intersects or touches the arc at one point
2
line intersects the arc at two points
- intersect_line(line: ConstructionLine, abs_tol: float = 1e-10) Sequence[Vec2]
Returns intersection points of arc and line as sequence of
Vec2objects.- Parameters:
line – intersection line
abs_tol – absolute tolerance for tests (e.g. test for tangents)
- Returns:
tuple of
Vec2objectstuple size
Description
0
no intersection
1
line intersects or touches the arc at one point
2
line intersects the arc at two points
- intersect_circle(circle: ConstructionCircle, abs_tol: float = 1e-10) Sequence[Vec2]
Returns intersection points of arc and circle as sequence of
Vec2objects.- Parameters:
circle – intersection circle
abs_tol – absolute tolerance for tests
- Returns:
tuple of
Vec2objectstuple size
Description
0
no intersection
1
circle intersects or touches the arc at one point
2
circle intersects the arc at two points
- intersect_arc(other: ConstructionArc, abs_tol: float = 1e-10) Sequence[Vec2]
Returns intersection points of two arcs as sequence of
Vec2objects.- Parameters:
other – other intersection arc
abs_tol – absolute tolerance for tests
- Returns:
tuple of
Vec2objectstuple size
Description
0
no intersection
1
other arc intersects or touches the arc at one point
2
other arc intersects the arc at two points
ConstructionEllipse
- class ezdxf.math.ConstructionEllipse(center: UVec = NULLVEC, major_axis: UVec = X_AXIS, extrusion: UVec = Z_AXIS, ratio: float = 1, start_param: float = 0, end_param: float = math.tau, ccw: bool = True)
Construction tool for 3D ellipsis.
- Parameters:
center – 3D center point
major_axis – major axis as 3D vector
extrusion – normal vector of ellipse plane
ratio – ratio of minor axis to major axis
start_param – start param in radians
end_param – end param in radians
ccw – is counter-clockwise flag - swaps start- and end param if
False
- minor_axis
minor axis as
Vec3, automatically calculated frommajor_axisandextrusion.
- ratio
ratio of minor axis to major axis (float)
- start
start param in radians (float)
- end
end param in radians (float)
- start_point
Returns start point of ellipse as Vec3.
- end_point
Returns end point of ellipse as Vec3.
- property param_span: float
Returns the counter-clockwise params span from start- to end param, see also
ezdxf.math.ellipse_param_span()for more information.
- to_ocs() ConstructionEllipse
Returns ellipse parameters as OCS representation.
OCS elevation is stored in
center.z.
- params(num: int) Iterable[float]
Returns num params from start- to end param in counter-clockwise order.
All params are normalized in the range from [0, 2π).
- vertices(params: Iterable[float]) Iterable[Vec3]
Yields vertices on ellipse for iterable params in WCS.
- Parameters:
params – param values in the range from [0, 2π) in radians, param goes counter-clockwise around the extrusion vector, major_axis = local x-axis = 0 rad.
- flattening(distance: float, segments: int = 4) Iterable[Vec3]
Adaptive recursive flattening. The argument segments is the minimum count of approximation segments, if the distance from the center of the approximation segment to the curve is bigger than distance the segment will be subdivided. Returns a closed polygon for a full ellipse: start vertex == end vertex.
- Parameters:
distance – maximum distance from the projected curve point onto the segment chord.
segments – minimum segment count
- params_from_vertices(vertices: Iterable[TypeAliasForwardRef('UVec')]) Iterable[float]
Yields ellipse params for all given vertices.
The vertex don’t have to be exact on the ellipse curve or in the range from start- to end param or even in the ellipse plane. Param is calculated from the intersection point of the ray projected on the ellipse plane from the center of the ellipse through the vertex.
Warning
An input for start- and end vertex at param 0 and 2π return unpredictable results because of floating point inaccuracy, sometimes 0 and sometimes 2π.
- dxfattribs() dict[str, Any]
Returns required DXF attributes to build an ELLIPSE entity.
Entity ELLIPSE has always a ratio in range from 1e-6 to 1.
- main_axis_points() Iterable[Vec3]
Yields main axis points of ellipse in the range from start- to end param.
- classmethod from_arc(center: UVec = NULLVEC, radius: float = 1, extrusion: UVec = Z_AXIS, start_angle: float = 0, end_angle: float = 360, ccw: bool = True) ConstructionEllipse
Returns
ConstructionEllipsefrom arc or circle.Arc and Circle parameters defined in OCS.
- Parameters:
center – center in OCS
radius – arc or circle radius
extrusion – OCS extrusion vector
start_angle – start angle in degrees
end_angle – end angle in degrees
ccw – arc curve goes counter clockwise from start to end if
True
- swap_axis() None
Swap axis and adjust start- and end parameter.
- add_to_layout(layout: BaseLayout, dxfattribs=None) Ellipse
Add ellipse as DXF
Ellipseentity to a layout.- Parameters:
layout – destination layout as
BaseLayoutobjectdxfattribs – additional DXF attributes for the ELLIPSE entity
ConstructionBox
- class ezdxf.math.ConstructionBox(center: UVec = (0, 0), width: float = 1, height: float = 1, angle: float = 0)
Construction tool for 2D rectangles.
- Parameters:
center – center of rectangle
width – width of rectangle
height – height of rectangle
angle – angle of rectangle in degrees
- center
box center
- width
box width
- height
box height
- angle
rotation angle in degrees
- bounding_box
- incircle_radius
incircle radius
- circumcircle_radius
circum circle radius
- __repr__() str
Returns string representation of box as
ConstructionBox(center, width, height, angle)
- classmethod from_points(p1: UVec, p2: UVec) ConstructionBox
Creates a box from two opposite corners, box sides are parallel to x- and y-axis.
- translate(dx: float, dy: float) None
Move box about dx in x-axis and about dy in y-axis.
- Parameters:
dx – translation in x-axis
dy – translation in y-axis
- expand(dw: float, dh: float) None
Expand box: dw expand width, dh expand height.
- scale(sw: float, sh: float) None
Scale box: sw scales width, sh scales height.
- rotate(angle: float) None
Rotate box by angle in degrees.
- is_any_corner_inside(other: ConstructionBox) bool
Returns
Trueif any corner of other box is inside this box.
- is_overlapping(other: ConstructionBox) bool
Returns
Trueif this box and other box do overlap.
- border_lines() Sequence[ConstructionLine]
Returns borderlines of box as sequence of
ConstructionLine.
- intersect(line: ConstructionLine) list[Vec2]
Returns 0, 1 or 2 intersection points between line and box borderlines.
- Parameters:
line – line to intersect with borderlines
- Returns:
list of intersection points
list size
Description
0
no intersection
1
line touches box at one corner
2
line intersects with box
ConstructionPolyline
- class ezdxf.math.ConstructionPolyline(vertices: Iterable[TypeAliasForwardRef('UVec')], close: bool = False, rel_tol: float = REL_TOL)
Construction tool for 3D polylines.
A polyline construction tool to measure, interpolate and divide anything that can be approximated or flattened into vertices. This is an immutable data structure which supports the
Sequenceinterface.- Parameters:
vertices – iterable of polyline vertices
close –
Trueto close the polyline (first vertex == last vertex)rel_tol – relative tolerance for floating point comparisons
Example to measure or divide a SPLINE entity:
import ezdxf from ezdxf.math import ConstructionPolyline doc = ezdxf.readfile("your.dxf") msp = doc.modelspace() spline = msp.query("SPLINE").first if spline is not None: polyline = ConstructionPolyline(spline.flattening(0.01)) print(f"Entity {spline} has an approximated length of {polyline.length}") # get dividing points with a distance of 1.0 drawing unit to each other points = list(polyline.divide_by_length(1.0))
- property length: float
Returns the overall length of the polyline.
- property is_closed: bool
Returns
Trueif the polyline is closed (first vertex == last vertex).
- data(index: int) tuple[float, float, Vec3]
Returns the tuple (distance from start, distance from previous vertex, vertex). All distances measured along the polyline.
- index_at(distance: float) int
Returns the data index of the exact or next data entry for the given distance. Returns the index of last entry if distance >
length.
- vertex_at(distance: float) Vec3
Returns the interpolated vertex at the given distance from the start of the polyline.
Shape2d
- class ezdxf.math.Shape2d(vertices: Iterable[TypeAliasForwardRef('UVec')] | None = None)
Construction tools for 2D shapes.
A 2D geometry object as list of
Vec2objects, vertices can be moved, rotated and scaled.- Parameters:
vertices – iterable of
Vec2compatible objects.
- bounding_box
Returns the bounding box of the shape.
- __len__() int
Returns count of vertices.
- __getitem__(item: int) Vec2
- __getitem__(item: slice) list[Vec2]
Get vertex by index item, supports
listlike slicing.
- append(vertex: UVec) None
Append single vertex.
- Parameters:
vertex – vertex as
Vec2compatible object
- extend(vertices: Iterable[TypeAliasForwardRef('UVec')]) None
Append multiple vertices.
- Parameters:
vertices – iterable of vertices as
Vec2compatible objects
- scale(sx: float = 1.0, sy: float = 1.0) None
Scale shape about sx in x-axis and sy in y-axis.
- scale_uniform(scale: float) None
Scale shape uniform about scale in x- and y-axis.
- rotate(angle: float, center: TypeAliasForwardRef('UVec') | None = None) None
Rotate shape around rotation center about angle in degrees.
- rotate_rad(angle: float, center: TypeAliasForwardRef('UVec') | None = None) None
Rotate shape around rotation center about angle in radians.
- offset(offset: float, closed: bool = False) Shape2d
Returns a new offset shape, for more information see also
ezdxf.math.offset_vertices_2d()function.- Parameters:
offset – line offset perpendicular to direction of shape segments defined by vertices order, offset >
0is ‘left’ of line segment, offset <0is ‘right’ of line segmentclosed –
Trueto handle as closed shape
Curves
Approximation tool for parametrized curves. |
|
B-spline construction tool. |
|
Generic Bézier curve of any degree. |
|
Implements an optimized quadratic Bézier curve for exact 3 control points. |
|
Implements an optimized cubic Bézier curve for exact 4 control points. |
|
This class represents an euler spiral (clothoid) for curvature (Radius of curvature). |
BSpline
- class ezdxf.math.BSpline(control_points: Iterable[TypeAliasForwardRef('UVec')], order: int = 4, knots: Iterable[float] | None = None, weights: Iterable[float] | None = None)
B-spline construction tool.
Internal representation of a B-spline curve. The default configuration of the knot vector is a uniform open knot vector (“clamped”).
Factory functions:
- Parameters:
control_points – iterable of control points as
Vec3compatible objectsorder – spline order (degree + 1)
knots – iterable of knot values
weights – iterable of weight values
- property count: int
Count of control points, (n + 1 in text book notation).
- property order: int
Order (k) of B-spline = p + 1
- property degree: int
Degree (p) of B-spline = order - 1
- property is_rational
Returns
Trueif curve is a rational B-spline. (has weights)
- property is_clamped
Returns
Trueif curve is a clamped (open) B-spline.
- knots() Sequence[float]
Returns a tuple of knot values as floats, the knot vector always has order + count values (n + p + 2 in text book notation).
- weights() Sequence[float]
Returns a tuple of weights values as floats, one for each control point or an empty tuple.
- params(segments: int) Iterable[float]
Yield evenly spaced parameters for given segment count.
- transform(m: Matrix44) BSpline
Returns a new
BSplineobject transformed by aMatrix44transformation matrix.
- approximate(segments: int = 20) Iterable[Vec3]
Approximates curve by vertices as
Vec3objects, vertices count = segments + 1.
- flattening(distance: float, segments: int = 4) Iterator[Vec3]
Adaptive recursive flattening. The argument segments is the minimum count of approximation segments between two knots, if the distance from the center of the approximation segment to the curve is bigger than distance the segment will be subdivided.
- Parameters:
distance – maximum distance from the projected curve point onto the segment chord.
segments – minimum segment count between two knots
- points(t: Iterable[float]) Iterable[Vec3]
Yields points for parameter vector t.
- Parameters:
t – parameters in range [0, max_t]
- derivative(t: float, n: int = 2) list[Vec3]
Return point and derivatives up to n <= degree for parameter t.
e.g. n=1 returns point and 1st derivative.
- Parameters:
t – parameter in range [0, max_t]
n – compute all derivatives up to n <= degree
- Returns:
n+1 values as
Vec3objects
- derivatives(t: Iterable[float], n: int = 2) Iterable[list[Vec3]]
Yields points and derivatives up to n <= degree for parameter vector t.
e.g. n=1 returns point and 1st derivative.
- Parameters:
t – parameters in range [0, max_t]
n – compute all derivatives up to n <= degree
- Returns:
List of n+1 values as
Vec3objects
- insert_knot(t: float) BSpline
Insert an additional knot, without altering the shape of the curve. Returns a new
BSplineobject.- Parameters:
t – position of new knot 0 < t < max_t
- knot_refinement(u: Iterable[float]) BSpline
Insert multiple knots, without altering the shape of the curve. Returns a new
BSplineobject.- Parameters:
u – vector of new knots t and for each t: 0 < t < max_t
- static from_ellipse(ellipse: ConstructionEllipse) BSpline
Returns the ellipse as
BSplineof 2nd degree with as few control points as possible.
- static from_arc(arc: ConstructionArc) BSpline
Returns the arc as
BSplineof 2nd degree with as few control points as possible.
- static from_fit_points(points: Iterable[TypeAliasForwardRef('UVec')], degree=3, method='chord') BSpline
Returns
BSplinedefined by fit points.
- static arc_approximation(arc: ConstructionArc, num: int = 16) BSpline
Returns an arc approximation as
BSplinewith num control points.
- static ellipse_approximation(ellipse: ConstructionEllipse, num: int = 16) BSpline
Returns an ellipse approximation as
BSplinewith num control points.
- bezier_decomposition() Iterable[list[Vec3]]
Decompose a non-rational B-spline into multiple Bézier curves.
This is the preferred method to represent the most common non-rational B-splines of 3rd degree by cubic Bézier curves, which are often supported by render backends.
- Returns:
Yields control points of Bézier curves, each Bézier segment has degree+1 control points e.g. B-spline of 3rd degree yields cubic Bézier curves of 4 control points.
- cubic_bezier_approximation(level: int = 3, segments: int | None = None) Iterable[Bezier4P]
Approximate arbitrary B-splines (degree != 3 and/or rational) by multiple segments of cubic Bézier curves. The choice of cubic Bézier curves is based on the widely support of this curves by many render backends. For cubic non-rational B-splines, which is maybe the most common used B-spline, is
bezier_decomposition()the better choice.approximation by level: an educated guess, the first level of approximation segments is based on the count of control points and their distribution along the B-spline, every additional level is a subdivision of the previous level.
E.g. a B-Spline of 8 control points has 7 segments at the first level, 14 at the 2nd level and 28 at the 3rd level, a level >= 3 is recommended.
approximation by a given count of evenly distributed approximation segments.
- Parameters:
level – subdivision level of approximation segments (ignored if argument segments is not
None)segments – absolute count of approximation segments
- Returns:
Yields control points of cubic Bézier curves as
Bezier4Pobjects
- degree_elevation(t: int) BSpline
Returns a new
BSplinewith a t-times elevated degree.Degree elevation increases the degree of a curve without changing the shape of the curve. This method implements the algorithm A5.9 of the “The NURBS Book” by Piegl & Tiller.
Added in version 1.4.
- point_inversion(point: UVec, *, epsilon=1e-8, max_iterations=100, init=8) float
Returns the parameter t for a point on the curve that is closest to the input point.
This is an iterative search using Newton’s method, so there is no guarantee of success, especially for splines with many turns.
- Parameters:
point (UVec) – point on the curve or near the curve
epsilon (float) – desired precision (distance input point to point on curve)
max_iterations (int) – max iterations for Newton’s method
init (int) – number of points to calculate in the initialization phase
Added in version 1.4.
- measure(segments: int = 100) Measurement
Returns a B-spline measurement tool.
All measurements are based on the approximated curve.
- Parameters:
segments – count of segments for B-spline approximation.
Added in version 1.4.
- class ezdxf.math.bspline.Measurement(spline: BSpline, segments: int)
B-spline measurement tool.
All measurements are based on the approximated curve.
Added in version 1.4.
- property length: float
Returns the approximated length of the B-spline.
- distance(t: float) float
Returns the distance along the curve from the start point for then given parameter t.
- param_at(distance: float) float
Returns the parameter t for a given distance along the curve from the start point.
- divide(count: int) list[float]
Returns the interpolated B-spline parameters for dividing the curve into count segments of equal length.
The method yields only the dividing parameters, the first (0.0) and last parameter (max_t) are not included e.g. dividing a B-spline by 3 yields two parameters [t1, t2] that divides the B-spline into 3 parts of equal length.
Bezier
- class ezdxf.math.Bezier(defpoints: Iterable[TypeAliasForwardRef('UVec')])
Generic Bézier curve of any degree.
A Bézier curve is a parametric curve used in computer graphics and related fields. Bézier curves are used to model smooth curves that can be scaled indefinitely. “Paths”, as they are commonly referred to in image manipulation programs, are combinations of linked Bézier curves. Paths are not bound by the limits of rasterized images and are intuitive to modify. (Source: Wikipedia)
This is a generic implementation which works with any count of definition points greater than 2, but it is a simple and slow implementation. For more performance look at the specialized
Bezier4PandBezier3Pclasses.Objects are immutable.
- Parameters:
defpoints – iterable of definition points as
Vec3compatible objects.
- params(segments: int) Iterable[float]
Yield evenly spaced parameters from 0 to 1 for given segment count.
- transform(m: Matrix44) Bezier
General transformation interface, returns a new
Beziercurve.- Parameters:
m – 4x4 transformation matrix (
ezdxf.math.Matrix44)
- approximate(segments: int = 20) Iterable[Vec3]
Approximates curve by vertices as
Vec3objects, vertices count = segments + 1.
- flattening(distance: float, segments: int = 4) Iterable[Vec3]
Adaptive recursive flattening. The argument segments is the minimum count of approximation segments, if the distance from the center of the approximation segment to the curve is bigger than distance the segment will be subdivided.
- Parameters:
distance – maximum distance from the center of the curve (Cn) to the center of the linear (C1) curve between two approximation points to determine if a segment should be subdivided.
segments – minimum segment count
- points(t: Iterable[float]) Iterable[Vec3]
Yields multiple points for parameters in vector t as
Vec3objects. Parameters have to be in range [0, 1].
Bezier4P
- class ezdxf.math.Bezier4P(defpoints: Sequence[T])
Implements an optimized cubic Bézier curve for exact 4 control points.
A Bézier curve is a parametric curve, parameter t goes from 0 to 1, where 0 is the first control point and 1 is the fourth control point.
The class supports points of type
Vec2andVec3as input, the class instances are immutable.- transform(m: Matrix44) Bezier4P[Vec3]
General transformation interface, returns a new
Bezier4pcurve as a 3D curve.- Parameters:
m – 4x4 transformation
Matrix44
- approximate(segments: int) Iterator[T]
Approximate Bézier curve by vertices, yields segments + 1 vertices as
(x, y[, z])tuples.- Parameters:
segments – count of segments for approximation
- flattening(distance: float, segments: int = 4) Iterator[T]
Adaptive recursive flattening. The argument segments is the minimum count of approximation segments, if the distance from the center of the approximation segment to the curve is bigger than distance the segment will be subdivided.
- Parameters:
distance – maximum distance from the center of the cubic (C3) curve to the center of the linear (C1) curve between two approximation points to determine if a segment should be subdivided.
segments – minimum segment count
- approximated_length(segments: int = 128) float
Returns estimated length of Bèzier-curve as approximation by line segments.
- point(t: float) T
Returns point for location t at the Bèzier-curve.
- Parameters:
t – curve position in the range
[0, 1]
- tangent(t: float) T
Returns direction vector of tangent for location t at the Bèzier-curve.
- Parameters:
t – curve position in the range
[0, 1]
Bezier3P
- class ezdxf.math.Bezier3P(defpoints: Sequence[T])
Implements an optimized quadratic Bézier curve for exact 3 control points.
The class supports points of type
Vec2andVec3as input, the class instances are immutable.- transform(m: Matrix44) Bezier3P[Vec3]
General transformation interface, returns a new
Bezier3Pcurve and it is always a 3D curve.- Parameters:
m – 4x4 transformation
Matrix44
- approximate(segments: int) Iterator[T]
Approximate Bézier curve by vertices, yields segments + 1 vertices as
(x, y[, z])tuples.- Parameters:
segments – count of segments for approximation
- flattening(distance: float, segments: int = 4) Iterator[T]
Adaptive recursive flattening. The argument segments is the minimum count of approximation segments, if the distance from the center of the approximation segment to the curve is bigger than distance the segment will be subdivided.
- Parameters:
distance – maximum distance from the center of the quadratic (C2) curve to the center of the linear (C1) curve between two approximation points to determine if a segment should be subdivided.
segments – minimum segment count
- approximated_length(segments: int = 128) float
Returns estimated length of Bèzier-curve as approximation by line segments.
- point(t: float) T
Returns point for location t at the Bèzier-curve.
- Parameters:
t – curve position in the range
[0, 1]
- tangent(t: float) T
Returns direction vector of tangent for location t at the Bèzier-curve.
- Parameters:
t – curve position in the range
[0, 1]
ApproxParamT
- class ezdxf.math.ApproxParamT(curve, *, max_t: float = 1.0, segments: int = 100)
Approximation tool for parametrized curves.
approximate parameter t for a given distance from the start of the curve
approximate the distance for a given parameter t from the start of the curve
These approximations can be applied to all parametrized curves which provide a
point()method, likeBezier4P,Bezier3PandBSpline.The approximation is based on equally spaced parameters from 0 to max_t for a given segment count. The
flattening()method can not be used for the curve approximation, because the required parameter t is not logged by the flattening process.- Parameters:
curve – curve object, requires a method
point()max_t – the max. parameter value
segments – count of approximation segments
- property max_t: float
- property polyline: ConstructionPolyline
- param_t(distance: float)
Approximate parameter t for the given distance from the start of the curve.
- distance(t: float) float
Approximate the distance from the start of the curve to the point t on the curve.
EulerSpiral
- class ezdxf.math.EulerSpiral(curvature: float = 1.0)
This class represents an euler spiral (clothoid) for curvature (Radius of curvature).
This is a parametric curve, which always starts at the origin =
(0, 0).- Parameters:
curvature – radius of curvature
- radius(t: float) float
Get radius of circle at distance t.
- distance(radius: float) float
Get distance L from origin for radius.
- approximate(length: float, segments: int) Iterable[Vec3]
Approximate curve of length with line segments. Generates segments+1 vertices as
Vec3objects.
- bspline(length: float, segments: int = 10, degree: int = 3, method: str = 'uniform') BSpline
Approximate euler spiral as B-spline.
- Parameters:
length – length of euler spiral
segments – count of fit points for B-spline calculation
degree – degree of BSpline
method – calculation method for parameter vector t
- Returns: